Aripă cu geometrie variabilă
O aripă cu geometrie variabilă este un tip de aripă care poate varia unghiul săgeții în timpul zborului.





De obicei, aripa retrasă este mai potrivită pentru zborul la viteze mari, în timp ce aripa extinsă este mai bună pentru viteze mai mici, permițând avionului să transporte și mai mult combustibil și marfă. Aripa cu geometrie variabilă oferă, așadar, aeronavei posibilitatea de a avea cele mai bune performanțe la orice viteză și, prin urmare, este mai utilă pentru acele aeronave care trebuie să funcționeze atât la viteze mari, cât și la viteze mici: de aceea a fost folosită mai ales pentru avioane militare .
Istorie
Primele avioane experimentale cu geometrie variabilă a aripii nu au avut decât să studieze efectele aripii retrase în zbor. Primul dintre acestea a fost Messerschmitt P.1101 , al cărui unghi de săgeată putea fi schimbat la sol. Al Doilea Război Mondial s-a încheiat însă înainte de finalizarea P.1101.
La scurt timp după aceea, P.1101 a fost adus în Statele Unite unde a fost studiat de către Bell Aircraft , dar, lipsită de documentație și daune structurale, Bell a renunțat la finalizarea acestuia. În locul său, a fost construită o aeronavă care putea schimba geometria aripii în zbor. O problemă descoperită în timpul testării modelului Bell X-5 a fost că, în timp ce aripile se mișcau înapoi, forța de ridicare făcea același lucru, iar avionul se trezi cu nasul îndreptat în jos. Trebuia adăugat un sistem pentru a compensa acest efect.
Imediat după război, Barnes Wallis a început să lucreze la aripa cu geometrie variabilă pentru a maximiza performanța zborurilor supersonice . Prima lucrare a fost despre proiectul militar Goose sălbatic , apoi s-a mutat la Rândunica Vickers , care trebuia să zboare din Europa în Australia în 10 ore. Avea o formă de fuzelaj integrată și nu avea coadă. În anii 1950, Wallis a efectuat zboruri Mach 2 cu un model la scară de 6 metri, dar finanțarea guvernului a fost retrasă. Wallis și echipa sa și-au prezentat munca în SUA și au găsit modalități de a-și continua munca, dar nu a rezultat nimic. [1] În 1949 , LE Baynes, inginer aeronautic și proiectant al Baynes Bat , a produs un design de luptător supersonic cu geometrie variabilă a aripilor, care nu a fost niciodată construit.
O aripă cu geometrie variabilă a fost testată pe Grumman F10F Jaguar în 1952 . XF10F nu a intrat niciodată în funcțiune, deoarece avea caracteristici de zbor nesatisfăcătoare. Ideea a revenit la începutul anilor 1960 ca o modalitate de a combina încărcarea mare a aripii cu performanțe bune la decolare și aterizare . Statele Unite au adoptat această configurație pentru programul TFX ( Tactical Fighter Experimental ), care a dus la General Dynamics F-111 , prima aeronavă cu geometrie aripă variabilă care a intrat în serviciu.
Cereri similare au fost făcute de biroul sovietic pentru aerodinamică, TsAGI , pentru a explora posibilitățile geometriei variabile. TsAGI a creat două tipuri de suprafețe ale aripilor care difereau în principal de distanța exprimată ca procent din anvergura aripilor totale dintre știfturile aripilor . Un spațiu mai mare nu numai că a redus efectele aerodinamice negative ale schimbării anvergurii aripilor, dar a prevăzut și o secțiune de aripă mai mare care ar putea fi utilizată pentru trenul de aterizare și piloni. Acest tip de aripă a fost cel folosit pe Sukhoi Su-17 și Tupolev Tu-22M . Cu toate acestea, distanța mai mare a avut un defect: a redus beneficiile aripii cu geometrie variabilă. Pentru noile modele, TsAGI a dezvoltat o suprafață aripă cu distanțare mai mică a pinilor, similară cu cea a F-111. Acest tip de aripă a fost utilizat pentru MiG-23 luptator si Sukhoi Su-24 interdictiv , prototipul care a început să zboare la sfârșitul anilor 1960 , intră în funcțiune de la începutul anilor 1970 .
După anularea proiectului BAC TSR-2 , Marea Britanie a început un program cu Franța pentru crearea avionului anglo-francez cu geometrie variabilă ( AFVG ). Cu finanțarea franceză redusă, Marea Britanie a căutat un partener de nivel secund în cadrul consorțiului european pentru F-104 . Toate acestea au determinat consorțiul european să adopte geometria variabilă a aripii în cadrul proiectului MRCA ( Multi-Role Combat Aircraft ) care a devenit în cele din urmă Panavia Tornado , [2] avioane de interdicție și interceptare similare în funcție cu F-111, deși mai mici.
Între timp, US Navy a pus în funcțiune luptătorul îmbarcat Grumman F-14 Tomcat , mai agil decât F-4 Phantom după anularea versiunii îmbarcate a F-111 (F-111B) considerată prea grea pentru a putea operează pe portavioane . Spre deosebire de F-111, aripile și-au schimbat geometria automat, în funcție de viteză. În timpul luptei, aripile ar putea fi retrase pentru a efectua anumite manevre. [3] [4]
Avioane
Experimentați-le
Producție în serie
-
 General Dynamics EF-111 Raven
General Dynamics EF-111 Raven - General Dynamics F-111
- Grumman F-14 Tomcat
-
 Mikoyan-Gurevich MiG-23
Mikoyan-Gurevich MiG-23 - Mikoyan-Gurevich MiG-27
-
 Panavia Tornado
Panavia Tornado - Rockwell B-1 Lancer
- Sukhoi Su-17
- Sukhoi Su-24
- Tupolev Tu-22M
- Tupolev Tu-160
Notă
- ^(EN) The Barnes Wallis Memorial Trust Depus la 6 aprilie 2007 în Internet Archive .
- ^ Buttler, Tony British Projects Secret: Jet Bombers Since 1949 .
- ^(EN) Copie arhivată la 209.196.57.95. Accesat la 21 aprilie 2010 (arhivat din original la 4 aprilie 2009) . F-14D Tomcat vs. F / 18 E / F Super Hornet Flight Journal Magazine februarie 2002 Numărul Bob Kress și RADM Gilchrist USNRet „luptă aeriană dedicată are loc sub aproximativ 0,8 din cauza tracțiunii ridicate de rotire - o arenă în care măturarea de 20 de grade a F-14 este optimă. .. are doar 36% din capacitatea utilă a F-14 / autonomie.
- ^ Fișier real: F-14 Tomcat .
Galerie de imagini

Tabelele de perspectivă ale luptătorului General Dynamics F-111 - bombardier
Tabelele de perspectivă ale luptătorului Grumman F-14 Tomcat s-au îmbarcat

Tabelele de perspectivă ale bombardierului strategic Rockwell B-1 Lancer

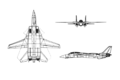
Tabelele de perspectivă ale luptătorului Mikoyan-Gurevich MiG-23MF "Flogger B" - bombardier

Tabelele de perspectivă ale unui bombardier Panavia Tornado

Tabelele de perspectivă ale luptătorului Sukhoi Su-17 - bombardier

Tabelele de perspectivă ale unui bombardier Sukhoi Su-24

Tabelele de perspectivă ale bombardierului strategic Tupolev Tu-22M

Tabelele de perspectivă ale bombardierului strategic Tupolev Tu-160









Alte proiecte
-
 Wikimedia Commons conține imagini sau alte fișiere pe Variable Geometry Wing
Wikimedia Commons conține imagini sau alte fișiere pe Variable Geometry Wing