Sistem de service mobil

Sistemul de service mobil ( MSS ) este un sistem robotizat dezvoltat pentru Stația Spațială Internațională . Sistemul joacă un rol cheie în construcția și întreținerea stației spațiale prin mutarea echipamentelor și structurilor din jurul stației, asistând astronauții cu activități extra- vehicul și efectuând alte operațiuni în afara stației. Sistemul este format din trei componente:
- Manipulator la distanță al stației spațiale (SSRMS sau Canadarm2 )
- Manipulator Dexterous cu scop special (SPDM sau Dextre)
- Sistemul de bază mobil (MBS).
Astronauții primesc instruire specifică pentru gestionarea brațului și a echipamentelor conexe. MSS a fost dezvoltat și fabricat de MDA Space Missions (fostul MD Robotics; inițial SPAR Aerospace) pentru Agenția Spațială Canadiană ca o contribuție a agenției la Stația Spațială Internațională (ISS).

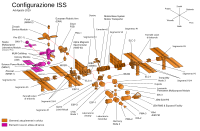
Sistemul se poate deplasa de-a lungul șinelor pe structura integrată de fermă deasupra coșului de transport mobil care conține sistemul de bază mobil. Software-ul sistemului este scris în limbajul de programare Ada 95 . [1]
Canadarm2



Cunoscut oficial ca Sistemul de manipulare la distanță a stației spațiale (SSRMS). Lansat pe STS-100 în aprilie 2001, această a doua generație de brațe robotizate este cea mai mare și mai avansată versiune a navetei spațiale Canadarm1 . Canadarm2 are o lungime de 17,6 m când este complet extins și are șapte articulații motorizate (o articulație „cot” în mijloc și trei articulații rotative la capătul fiecărei „încheieturi / umăr”). Are o masă de 1800 kg, un diametru de 35 cm, este realizată din titan și este capabilă să deplaseze orice sarcină echipată cu dispozitiv de prindere până la 116000 kg. Este capabil să se deplaseze end-over-end pentru o mare parte a Stației Spațiale, la fel ca mișcările efectuate de Geometridae. Aceste mișcări sunt limitate doar de poziția și de numărul de dispozitive Power and Data Grapple (PDGF) prezente pe stație. PDGF-urile sunt puncte de andocare echipate cu conectori pentru alimentare, date și video care se conectează la capetele Canadarm2, Latching End Effectors (LEE). Brațul poate, de asemenea, să parcurgă întreaga lungime a grinzii stației folosind sistemul de bază mobil. În timpul construcției stației, brațul a fost folosit pentru a muta componentele mai mari ale stației, cum ar fi modulele sau panourile solare. Acesta este utilizat în prezent pentru a captura nave spațiale de marfă fără pilot , cum ar fi SpaceX lui Dragon , Northrop Grumman Cygnus și japonez HTV și care sunt echipate cu un zbor-eliberabilă Graifer Meci care Canadarm2 utilizări pentru a captura și andocare (și apoi eliberați) , nava spatiala la gara . [2]
Astronauții de pe ISS urmăresc mișcările Canadarm2 de pe cele trei ecrane LCD ale unei stații de lucru robotizate (RWS). MSS are două unități RWS: una situată în Dome (principală) și cealaltă în modulul Destiny (backup), deși doar un singur RWS poate controla MSS odată. RWS are două seturi de joystick-uri de control: Rotational Hand Controller (RHC), care controlează rotațiile, și Translational Hand Controller (THC), care controlează traducerea. La acestea se adaugă Panoul de Afișare și Control (DCP) și Sistemul Portabil de Calculatoare (PCS).
În ultimii ani, majoritatea operațiunilor robotizate au fost controlate de la distanță de către controlorii de zbor la sol de la Johnson Space Center sau Agenția Spațială Canadiană . Controlorii pot lucra pe rând pentru a finaliza obiectivele cu mai multă flexibilitate decât atunci când sunt efectuați de membrii echipajului la bord, deși într-un ritm mai lent. [3] Astronauții sunt folosiți în operații cu timp limitat, cum ar fi capturarea unei nave spațiale sau în sprijinul unei activități extravehiculare .
Blocarea efectorului final


Canadarm2 are două Latching End Effectors (LEE), unul la fiecare capăt. Un LEE are 3 cabluri care prin strângere captează știftul dispozitivului Grapple Fixture . [4] Un alt LEE este situat pe unitatea de încărcare ORU Accommodation (POA) a sistemului de bază mobil, care este utilizat pentru a ține temporar componentele ISS mari. Un alt lucru se află pe Manipulatorul Dexterous cu scop special (SPDM, cunoscut și sub numele de Dextre sau Canada hand ). Șase LEE au fost fabricate și utilizate în diferite locații de pe ISS.
| S / N | Poziția inițială | Poziția reală |
|---|---|---|
| 201 | LEE B | POA LEE |
| 202 | LEE A | La sol, pentru a fi renovat pentru înlocuire |
| 203 | POA LEE | LEE A |
| 204 | Înlocuire localizată pe ELC-1 | LEE B |
| 205 | La sol, Spare | Înlocuire situată în afara ISS |
| 301 | SPDM LEE | SPDM LEE |
Manipulator Dexter cu scop special

Manipulatorul Dexterous cu scop special, sau Dextre , este un robot mic cu două brațe care poate fi atașat la Canadarm2, ISS sau sistemul de bază mobil. Brațele și instrumentele sale sunt capabile să facă față sarcinilor delicate de asamblare și să schimbe unitățile de înlocuire orbitală (ORU) operate în prezent de astronauți în timpul activităților extravehiculare. Deși Canadarm2 se poate deplasa în jurul stației, nu poate transporta obiecte decât dacă Dextre este atașat la ea. Testele au fost efectuate în camere de simulare spațială la Laboratorul David Florida al Agenției Spațiale Canadiene din Ottawa , Ontario. Dextre a fost lansat spre stație la 11 martie 2008 cu STS-123 .
Sistem de bază mobil

Sistemul de bază Mobile Remote Servicer (MBS) este o platformă pentru brațe robotizate. A fost adăugat la stație în timpul STS-111 în iunie 2002. Platforma se află deasupra căruciorului Mobile Transporter (instalat de STS-110 , dezvoltat de Northrop Grumman în Carpinteria , California , care vă permite să alunecați de-a lungul a 108 metri șine pe structura integrată a fermei. Când Canadarm2 și Dextre sunt conectate la MBS, acestea au o masă combinată de 4900 kg. La fel ca Canadarm2, a fost construit de MDA Space Missions și are o durată de viață minimă de 15 ani. [5]
MBS dispune de patru dispozitive Power and Data Grapple, câte unul în fiecare dintre cele patru colțuri superioare. Fiecare dintre acestea poate fi folosit ca bază pentru cele două brațe, Canadarm2 și Dextre, precum și oricare dintre sarcinile utile care ar putea fi transportate de către acestea. MBS are, de asemenea, două locații pentru a lega încărcăturile utile: Unități de încărcare utilă / unitate de înlocuire orbitală (POA) și MBS Common Attachment System (MCAS). Primul este foarte asemănător cu Canadarm2 LEE și poate fi folosit pentru a parca, alimenta și controla orice sarcină utilă cu un dispozitiv Grapple, putând astfel folosi Canadarm2 pentru altceva. Al doilea folosește în schimb un alt tip de sistem de andocare care poate găzdui experimente științifice.
MBS sprijină, de asemenea, astronauții în timpul activităților extravehiculare . Are locații pentru depozitarea uneltelor și echipamentelor, sistemele de fixare a picioarelor, balustradele și punctele de fixare a cablului de siguranță, precum și un ansamblu de camere. Dacă este necesar, este de asemenea posibil ca un astronaut să călătorească pe MBS, deoarece se deplasează cu o viteză maximă de aproximativ 1,5 metri pe minut. [6] Pe ambele părți ale MBS sunt două mijloace de traducere pentru echipaj și echipamente , cărucioare care rulează pe aceleași șine ca MBS. Astronauții îi ghidează manual în timpul EVA-urilor pentru a transporta echipamente și pentru a le facilita mișcarea în jurul stației.

Sistemul de senzor al brațului Orbiter
Este un stâlp de 15,24 metri echipat cu balustrade și camere de inspecție, care poate fi conectat la capătul Canadarm2.

Shuttle Remote Manipulator System (RMS) a andocat la OBSS în timpul STS-114

Astronautul Scott Parazynski (dreapta) a andocat pe OBSS în timp ce repara un panou solar în timpul STS-120


Alte brațe robotizate ale ISS
Stația a primit un al doilea braț robotizat în timpul STS-124 , sistemul de manipulare la distanță a modulului de experiment japonez (JEM-RMS). JEM-RMS este utilizat în principal pentru deservirea facilității expuse JEM . Un braț robotizat suplimentar, brațul european robotic (ERA), este așteptat să fie lansat împreună cu modulul de laborator polivalent rus în 2020.
Segmentul rusesc al ISS are, de asemenea, două macarale manuale conectate la Pirs , Strela . Una dintre macarale poate fi extinsă pentru a ajunge la modulul Zarja, în timp ce cealaltă se poate extinde în partea opusă și ajunge la Zvezda . Prima macara a fost asamblată în spațiu în timpul STS-96 și STS-101 și a doua a fost lansată împreună cu Pirs.
Notă
- ^ (EN) Studiu de caz: MDA - Canadian Space Arm (PDF) pe adacore.com, AdaCore. Adus la 15 octombrie 2009 .
- ^ (RO)Despre Canadarm2 , pe asc-csa.gc.ca. Adus pe 7 august 2019 .
- ^
 Animație pentru trecerea Canadarm2 de la un dispozitiv Grapple la altul de-a lungul stației , pe YouTube , 1 mai 2014. Accesat la 7 august 2019 .
Animație pentru trecerea Canadarm2 de la un dispozitiv Grapple la altul de-a lungul stației , pe YouTube , 1 mai 2014. Accesat la 7 august 2019 . - ^ (RO) EVA Checklist STS-126 Flight Supplement (PDF) pe nasa.gov, 2008, pp. 115-118.
- ^ Animația Canadarm2, Dextre și Mobile Base System care lucrează împreună , pe YouTube , 26 ianuarie 2009. Accesat pe 7 august 2019 .
- ^ (RO) Cel mai lent și mai rapid tren din Univers , pe nasa.gov, NASA, 24 martie 2004.
Elemente conexe
- Canadarm1 , braț robotizat Shuttle
- European Robotic Arm , viitorul al treilea braț robotizat al Stației
- Dextre , un mic braț robotizat folosit pentru cele mai delicate operațiuni de pe ISS
Alte proiecte
-
 Wikimedia Commons conține imagini sau alte fișiere pe sistemul de service mobil
Wikimedia Commons conține imagini sau alte fișiere pe sistemul de service mobil
linkuri externe
- ( EN ) Informații despre sistemul de service mobil de pe site-ul NASA , la nasa.gov .
- ( RO ) Informații despre Canadarm2 de pe site-ul CSA , la adresa asc-csa.gc.ca .