Momentul mecanic, indicat cu {\ displaystyle \ mathbf {M}} sau, în contextul anglo-saxon, cu {\ displaystyle {\ boldsymbol {\ tau}}} (din cuplul în limba engleză), exprimă atitudinea unui forță pentru a da o rotație a unui corp rigid în jurul unei axe , atunci când acest lucru nu este aplicată de centrul de masă , în caz contrar ar exista mișcare de translație . Prin urmare, constituie momentul de forță .
Analiza momentelor mecanice determină echilibrul stării corpurilor extinse și servește pentru studiul mișcărilor de rotație, de fapt , ele apar în a doua ecuație Euler .
Momentul mecanic[2] în ceea ce privește un anumit punct {\ displaystyle O} , Numit pol sau centru de rotație, este definit în mecanica newtoniană ca produsul vectorial dintre vectorul poziție, în raport cu polul sine, iar forța: [3][4]
Vectorul {\ displaystyle \ mathbf {\ vec {M_ {O}}}} este perpendicular pe planul definit de {\ displaystyle \ mathbf {\ vec {F}}} și din {\ displaystyle \ mathbf {\ vec {r}}} și versetul, așa cum este exprimat prin regula mâna dreaptă , este acela al unui observator care vede prin rotație{\ displaystyle \ mathbf {\ vec {F}}} în sens invers acelor de ceasornic. Măreția {\ displaystyle \ mathbf {r} \ sin \ vartheta} , distanța axei de rotație față de linia dreaptă pe care se află {\ displaystyle \ mathbf {\ vec {F}}} , Se numește braț{\ displaystyle \ mathbf {b}} de forță {\ displaystyle \ mathbf {\ vec {F}}} .
De sine {\ displaystyle \ mathbf {F}} Și {\ displaystyle \ mathbf {r}} sunt ortogonale între ele brațul este exact egal cu modulul de {\ displaystyle \ mathbf {r}} și modulul momentului este maxim (vezi de pârghie ). Momentul poate fi nul în cazul în care forța sau brațul sunt nule , sau dacă {\ displaystyle \ mathbf {F}} este paralel cu {\ displaystyle \ mathbf {r}} .
Dacă sistemul este compus din mai multe componente asemănătoare punctelor, momentul mecanic total este suma momentelor mecanice individuale, fiecare datorită forței asupra componentei unice și a brațului său:
{\ displaystyle \ mathbf {M} = \ sum _ {i} m_ {i} \ mathbf {r} _ {i} \ times {\ hat {\ mathbf {n}}} _ {i} = \ sum _ { i} \ mathbf {r} _ {i} \ times \ mathbf {F} _ {i}}
Moment , mecanică axială a unei forțe în raport cu o axă este definită {\ displaystyle {\ hat {z}}} trecând printr-un punct {\ displaystyle O} componenta ortogonală a momentului polar pe o anumită axă {\ displaystyle {\ hat {z}}} , numită axă centrală:
{\ displaystyle \ mathbf {M} _ {\ hat {z}}: = [(\ mathbf {r} \ times \ mathbf {F}) \ cdot {\ hat {\ mathbf {z}}}] {\ hat {\ mathbf {n}}}}
unde este {\ displaystyle {\ hat {\ mathbf {n}}}} este un vector unitar , vector de lungime unitară, care identifică axa. Modulul va fi:
{\ displaystyle M _ {\ hat {n}} = | \ mathbf {M} _ {O} | \ cdot \ cos \ varphi = | \ mathbf {r} | \ cdot | \ mathbf {F} | \ sin \ vartheta \ cos \ varphi = (\ mathbf {F} \ cdot \ mathbf {b}) \ cos \ varphi}
unde este {\ displaystyle \ varphi} este unghiul format de vectorul momentului polar {\ displaystyle \ mathbf {M} _ {O}} cu axa {\ displaystyle {\ hat {n}}} . În practică este proiecția ortogonală a momentului polar pe axă {\ displaystyle {\ hat {n}}} . Pentru aceasta, momentul axial este zero dacă unghiul {\ displaystyle \ varphi = \ pi / 2} și maxim atunci când axa {\ displaystyle {\ hat {z}}} coincide cu axa lui {\ displaystyle \ mathbf {M} _ {O}} ; în acest caz, de fapt: {\ displaystyle \ varphi = 0} .
Stări teorema lui Varignon că momentul care rezultă din suma momentelor mecanice aplicate în același punct, sau echivalent suma momentelor axiale plasate la aceeași distanță față de o axă de referință, corespunde momentului mecanic al rezultantei :
Derivarea momentul cinetic în raport cu timpul {\ displaystyle \ mathbf {L}} comparativ cu un stâlp {\ displaystyle O} a unui sistem de {\ displaystyle n} se obțin puncte materiale:
În cazul în care polo {\ displaystyle O} este nemișcat, momentul mecanic este egal cu variația momentului unghiular în jurul aceluiași centru sau axă a primului:
Luând relația demonstrată în paragraful anterior, în cazul unui rotativ corp rigid , se poate observa că {\ displaystyle \ mathbf {v} _ {O}} reprezintă viteza tangențială a corpului care se rotește, de aceea avem că:
în acest caz impulsul unghiular este corelat cu mișcarea rotativă. De fapt, impulsul unghiular este proporțional cu viteza unghiulară {\ displaystyle {\ boldsymbol {\ omega}}} prin tensorul de inerție {\ displaystyle {\ underline {\ underline {\ mathbf {I}}}}} :
unde este {\ displaystyle {\ boldsymbol {\ alpha}}} este accelerația unghiulară . Momentul cinetic este de asemenea proporțională cu viteza areolar{\ displaystyle {\ dot {\ mathbf {A}}}} prin masă {\ displaystyle m} :
unde este {\ displaystyle {\ ddot {\ mathbf {A}}}} este accelerația areolar .
Ecuația care leagă momentul mecanic cu viteza unghiulară poate fi rescrisă prin relația Poisson ; de fapt, vectorul produsului triplu poate fi transformată într - un produs obișnuit folosind matricea antisimetrică a vitezei unghiulare, prin analogie , de exemplu cu definiția tensorului Kong , definit , de exemplu , într - un spațiu tridimensional ca:
Ca exemplu notabil, considerați că un corp este constrâns la o axă fixă barentrică într-o referință unde este înclinat ca axă {\ displaystyle {\ hat {z}}} , Cum ar fi o manivelă :
{\ displaystyle {\ boldsymbol {\ omega}} = {\ begin {bmatrix} 0 \\ 0 \\\ omega \ end {bmatrix}}}
În mecanică solidă, un moment mecanic se traduce printr - o tensiune în funcție de faptul dacă este îndoire , adică paralelă orientată spre secțiunea sau răsucirea , dacă orientat perpendicular pe secțiunea.
Într - o structură plană pe care numai forțe coplanare acționează, nu sunt doar momente de îndoire.
Muncă și energie potențială de rotație
Munca de rotație
Lucrul de rotație efectuat de momentul mecanic este:
Ca și în cazul translațional, este deci posibil pentru un moment să efectueze și o muncă negativă, dacă se opune deplasării unghiulare reale sau zero, dacă este normală la deplasarea unghiulară reală. Aici observăm analogiile cu munca translatie, care permit unificarea Lagrangiana a forței generalizate .[ neclar ]
Energia potențială de rotație
Un moment mecanic, în mod similar cu o forță, poate fi conservatoare și , prin urmare , recunosc o energie potențială în conformitate cu Lema lui Poincaré :
În acest caz , rezultă un sistem cu un unghiular grad de libertate :
{\ displaystyle U (\ theta) = - \ int _ {\ theta _ {0}} ^ {\ theta} M (\ alpha) \, \ mathrm {d} \ alpha + U (\ theta _ {0}) ,}
Valoarea energiei potențiale în {\ displaystyle \ theta _ {0}} este definit în mod arbitrar din punct de vedere matematic; o condiție Dirichlet este de obicei impusă, la care starea localitate nu este aplicabilă , deoarece , în general , energia potențială de rotație este întotdeauna periodică în variabilele sale unghiulare cu perioada maximă {\ displaystyle 2 \ pi} .
În cele din urmă, în cazul mai general cu cele trei grade de rotație ale libertății:
unde este {\ displaystyle {\ boldsymbol {\ omega}}} este viteza unghiulară a punctului.
Pereche de forțe
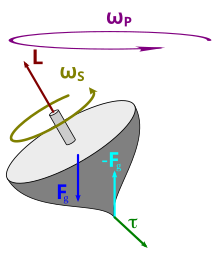
Momentul mecanic pur cauzat de perechea de forțe {\ displaystyle \ mathbf {F} _ {g}} Și {\ displaystyle - \ mathbf {F} _ {g}} provoacă o modificare a impulsului unghiular {\ displaystyle \ mathbf {L}} în direcția 55. Aceasta induce o precesie în partea de sus.
O problemă foarte frecventă este măsurarea forței exercitate de ceva care se întoarce. Cel mai natural mod este de a stabili un bar la rotor și se măsoară forța pe care o exercită ortogonală la o anumită distanță față de punctul de sprijin. În acest moment, prin convenție, „forța unui rotor” ar putea fi definită ca cea măsurată la distanță, de exemplu, la un metru de punctul de sprijin. În acest fel ar fi posibil să se compare forțele diferiților rotori.
Conform legilor care guvernează leviere, modulul produsului vectorial între forța și distanța de la punctul de sprijin, numit brațul forței, este o constantă. Dacă forța exercitată ortogonal barului este măsurată la o distanță de jumătate de metru, se constată că este dublă față de cea măsurată la un metru; la 10 cm este de zece ori mai mare; doi metri este jumătate și așa mai departe. Prin urmare, în rezumat, numai produsul: brațul × forța este relevantă pentru un corp rigid , și nu valorile singulare ale celor două componente.
Cuplul este adesea utilizat în industria mecanică pentru a cuantifica puterea generată de un motor în conformitate cu formula:
{\ displaystyle P} este puterea motorului exprimată în W (wați) la numărul de rotații dorit
{\ displaystyle \ mathbf {T}} este cuplul generat exprimat în N m (newton × metri)
{\ displaystyle {\ boldsymbol {\ omega}}} este viteza unghiulară , exprimată în radiani pe secundă la care puterea se referă {\ displaystyle P} , unde este {\ displaystyle \ omega = 2 \ pi f} , cu {\ displaystyle f}frecvența de rotație , măsurată în rotații pe secundă



















![{\ displaystyle \ mathbf {M} _ {\ hat {z}}: = [(\ mathbf {r} \ times \ mathbf {F}) \ cdot {\ hat {\ mathbf {z}}}] {\ hat {\ mathbf {n}}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/bc9745d600c94dce0822b2f905bf9e65b1a63367)
















































 Wikimedia Commons conține imagini sau alte fișiere pe moment , mecanice
Wikimedia Commons conține imagini sau alte fișiere pe moment , mecanice