Orbiterul de recunoaștere al Marte
Această intrare sau secțiune despre subiectul misiunilor spațiale nu menționează sursele necesare sau cei prezenți sunt insuficienți . |
| Orbiterul de recunoaștere al Marte | |||||
|---|---|---|---|---|---|
| Emblema misiunii | |||||
 | |||||
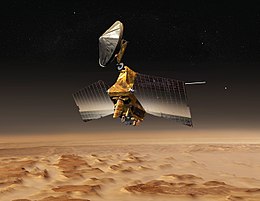
| Imaginea vehiculului | |||||
 | |||||
| Date despre misiune | |||||
| Operator | | ||||
| ID NSSDC | 2005-029A | ||||
| SCN | 28788 | ||||
| Destinaţie | Marte | ||||
| Satelit de | Marte | ||||
| Rezultat | Misiunea este în prezent în desfășurare | ||||
| Vector | Atlas V 401 | ||||
| Lansa | 12 august 2005 | ||||
| Locul lansării | CCAFS SLC-41 | ||||
| Durată | Misiunea primară : 2 ani Timp petrecut : 11 ani și 8 luni | ||||
| Proprietatea navei spațiale | |||||
| Putere | 2 kW | ||||
| Masa | La lansare : 2180 kg Uscat : 1031 kg | ||||
| Greutate la lansare | 2 180 kg | ||||
| Greutatea sarcinii | 139 kg | ||||
| Constructor | Lockheed Martin | ||||
| Sarcină | 139 kg | ||||
| Instrumentaţie |
| ||||
| Parametrii orbitali | |||||
| Orbită | heliosincron | ||||
| Data inserării orbitei | 10 martie 2006, la 21:24:00 UTC | ||||
| Înclinare | 93 de grade | ||||
| Site-ul oficial | |||||
| Programul de explorare pe Marte | |||||
| |||||
Mars Reconnaissance Orbiter (acronim: MRO ) este o sondă spațială universală NASA lansată pe 12 august 2005 . Scopul său este analiza detaliată a planetei Marte pentru a identifica un potențial loc de aterizare pentru viitoarele misiuni pe planetă. Nava spațială este, de asemenea, concepută pentru a oferi viitoarelor misiuni un canal de transmisie în bandă largă între Pământ și Marte. Este proiectat pentru a efectua observații de înaltă rezoluție ale lui Marte.
Prezentare generală

MRO își desfășoară misiunea științifică de doi ani, începând cu inspecțiile tehnice și de frânare cu aer care au fost finalizate în noiembrie 2006 . Misiunea a fost ulterior extinsă pentru a face din satelit un canal de comunicare pentru alte experimente științifice.
Mars Reconnaissance Orbiter va fi folosit de NASA pentru planificarea viitoarelor misiuni terestre, care includ Phoenix Mars Lander , care a ajuns pe planetă în 2008, și Mars Science Laboratory , un rover avansat care a aterizat pe suprafața planetei pe 6 august 2012. [1] MRO este o sondă echipată cu instrumente de înaltă rezoluție concepute pentru a studia cel mai bun punct de aterizare de pe Marte. Instrumentele MRO permit NASA să aleagă locația cu cel mai mic risc și cel mai mare beneficiu din punct de vedere științific. Instrumentele vor fi, de asemenea, utilizate pentru a investiga motivul eșecului misiunii Mars Polar Lander și misiuniiESA Beagle , precum și a sitului de impact Schiaparelli EDM Lander , care face parte din misiunea ExoMarsa Agenției Spațiale Europene .
Cronologia lansării și călătoriei
- La 30 aprilie 2005 , sonda a fost transportată la locul de lansare.
- La 9 august 2005, prima fereastră de lansare , cea din 10 august, a fost abandonată din cauza unor probleme care au apărut cu giroscopul vectorului Atlas V.
- Pe 10 august, problemele giroscopului au fost rezolvate, lansarea a fost programată pentru ora 7:50 AM EST pe 11 august.
- Pe 11 august, condițiile meteorologice nefavorabile au mutat lansarea la 9:00 EST. Detecțiile conflictuale transmise de senzorii rachetei cu privire la rezervoarele de hidrogen lichid au forțat controlul misiunii să mute lansarea la 7:43 dimineața EST, pe 12 august.
- La 7:43 am EST, 12 august, a fost lansat MRO . Nu au apărut anomalii semnificative în timpul lansării sau desfășurării sondei în spațiu. Prima corecție a traiectoriei ar trebui să aibă loc în 20 de zile.
- La 15 august 2005 , MARCI este testat și calibrat.
- Orbiterul de recunoaștere al Marte a parcurs 100 de milioane de kilometri spre Marte pe 25 august 2005 .
- Pe 27 august se efectuează prima manevră de corecție orbitală. Cele șase motoare principale sunt activate timp de 15 secunde prin schimbarea vitezei sondei cu 7,8 m / s; în acest moment viteza relativă față de Soare este de 32 856 m / s. Aceleași motoare vor fi utilizate lângă Marte pentru introducerea pe orbită. [2]
- Pe 8 septembrie 2005, MRO finalizează calibrarea instrumentului HiRISE și CTX prin observații ale Lunii care se află în prezent la 10 milioane de kilometri distanță.
- La 19 noiembrie 2005, sonda efectuează a doua corecție orbitală, pornește cele 6 propulsoare secundare timp de 20 de secunde, variind viteza de 75 de centimetri pe secundă.
- Orbiterul de recunoaștere al Marte din 29 ianuarie 2006 este la 10 milioane de kilometri de Marte.
- La 3 februarie 2006, nava spațială și-a început manevrele de apropiere orbitală.
Cronologia misiunii

Mars Reconnaissance Orbiter a fost lansat pe 12 august 2005 . În perioada 10 - 30 august, fereastra de lansare de două ore a fost disponibilă aproape în fiecare zi. A fost lansată de la Complexul de lansare spațială a stației forțelor aeriene Cape Canaveral 41, cu o rachetă Atlas V- 401 echipată cu o etapă Centaur. La 56 de minute de la lansare, stadionul Centaur a ars complet, punând MRO pe orbita de tranzit interplanetară către Marte.
MRO a călătorit în spațiu timp de 7 luni și jumătate înainte de a ajunge pe Marte. Au fost necesare patru corecții ale traiectoriei în timpul zborului, plus, evident, toate cele necesare pentru a pune sonda pe o orbită stabilă a lui Marte.
Inserarea orbitală a MRO a început pe 3 martie și s-a încheiat pe 10 martie 2006 . În următoarele două săptămâni, au fost efectuate analize asupra instrumentelor și a eficienței sondei.
Frânarea aeriană a început pe 30 martie, care a fost utilizată pentru a dirija sonda pe o orbită inferioară parcursă cu o viteză mai mare. Această tehnică este utilizată din cauza economiilor de combustibil rezultate, o inserție orbitală bazată în întregime pe motoare ar fi consumat dublul combustibilului.
Aerofrenajul constă din trei faze:
- MRO își reduce înălțimea utilizând motoare. Înălțimea frânei de aer va fi apoi definită, în funcție de densitatea atmosferei marțiene. Trebuie amintit că presiunea atmosferică marțiană variază în funcție de anotimpuri. Această fază va dura aproximativ 5 orbite și aproximativ o săptămână.
- MRO rămâne în frânarea cu aer timp de aproximativ 5 luni și jumătate pe Pământ, ceea ce echivalează cu aproximativ 500 de orbite, cu mici corecții orbitale. Această fază va aduce sonda pe o orbită cu o distanță maximă de Marte de aproximativ 450 km, astfel încât să nu supraîncălzească sonda și, în același timp, să o mențină suficient de scufundată în atmosferă pentru a face frânarea aeriană eficientă.
- Faza de frânare aeriană s-a încheiat pe 30 august, când MRO și-a folosit motoarele pentru a ieși din atmosfera marțiană.
După efectuarea unei corecții finale în septembrie 2006 , sonda a atins orbita finală, care este aproape perfect circulară la o altitudine cuprinsă între 250 și 316 km [3] .
Antena dipolară SHARAD a fost desfășurată pe 16 septembrie și testarea tuturor instrumentelor științifice a fost finalizată înainte ca acestea să fie oprite înainte ca conjuncția solară să aibă loc între 7 octombrie și 6 noiembrie. După conjuncție, a început faza primară a misiunii.
La 17 noiembrie 2006, NASA a anunțat că sonda a fost testată cu succes ca repetor de telecomunicații, trimitând date de la rover-ul Spirit pe Pământ.
Din 2006 până în 2008, nava spațială a realizat imagini de înaltă rezoluție ale atmosferei, subsolului și suprafeței Marte, pentru a alege țintele de interes și în căutarea unui punct de aterizare adecvat pentru landerul Phoenix Mars , care a ajuns în 2008 pe Marte este fotografiat de la camera HiRISE în timpul aterizării. Până în 2010 a capturat apoi alte imagini ale morfologiei planetei în căutarea unor zone locuibile și a unui loc de aterizare pentru Laboratorul de Științe Marte .
În 2010, nava a atins limita a peste 100 de terabyți colectați și trimiși pe Pământ. Până în 2012 s-a dedicat studiului variațiilor sezoniere ale planetei, precum și monitorizării locului de aterizare a roverului Curiosity , care a ajuns pe Marte în august 2012. Ulterior, a revenit la studiul proceselor atmosferice și de suprafață legate de schimbările sezoniere. , continuând să susțină din orbită roverii Oportunitate și Curiozitate [4] .
Echipament


Principalele obiective ale Mars Reconnaissance Orbiter sunt căutarea și detectarea apei, analiza atmosferei și a geologiei planetei.
Șase instrumente științifice sunt incluse în sondă împreună cu două instrumente complementare care vor utiliza datele sondei pentru a colecta date științifice. Trei tehnologii experimentale sunt incluse în sondă, prin urmare aceasta va fi folosită și pentru a verifica funcționarea noilor soluții tehnice.
- Cameră
- Spectrometre
- CRISM (Spectrometru de imagistică de recunoaștere compactă pentru Marte)
- Radiometru
- MCS (Mars Climate Sounder)
- Radar
- SHARAD (radar superficial)
- Instrumente complementare
- Experimente tehnologice
- Pachetul de comunicații și navigație Electra UHF
- Cameră de navigare optică
- Pachetul Experiment de telecomunicații cu bandă Ka (descris în secțiunea Sistem de telecomunicații )
Instrumentare științifică
Salut
Experimentul de știință imagistică de înaltă rezoluție ( HiRISE ) este un telescop de reflexie de 0,5 m , cel mai mare folosit vreodată într-o misiune spațială. Are o putere de rezolvare de 0,3, dar o înălțime de 300 km. Poate primi imagini color în benzile roșii, verzi și albastre și în infraroșu.
Pentru comparație, imaginile realizate de sateliții Pământului au o definiție de 0,1 m, în timp ce imaginile afișate de Google Maps au o rezoluție maximă de 1 m. [ fără sursă ]
Pentru a facilita cartarea și identificarea posibilelor locuri de aterizare, HiRISE va produce imagini stereoscopice în care vor fi afișate informații topografice cu o definiție de 0,25 metri.


CTX
Context Imager ( CTX ) va oferi imagini monocrome cu lățimea de 40 km, cu o rezoluție de 8 metri. CTX este proiectat să funcționeze împreună cu celelalte instrumente de imagine pentru a oferi context pentru hărțile detectate de celelalte instrumente.
MARCI
Mars Color Imager ( MARCI ) va împărți imaginile Marte în 5 benzi vizibile și 2 benzi ultraviolete. MARCI va produce hărți globale ale planetei pentru a studia variațiile zilnice, sezoniere și anuale ale climatului, instrumentul va oferi, de asemenea, indicațiile meteorologice zilnice ale planetei.
CRISM

Instrumentul Compact Reconnaissance Imaging Spectrometers for Mars ( CRISM ) este un spectrometru care funcționează în lumină vizibilă și în infraroșu. Va produce hărți detaliate ale mineralogiei planetei. Are o putere de rezolvare de 18 metri la 300 km. Funcționează între frecvența de 400 nanometri și cea de 4050 nanometri, împărțind spectrul a 560 de canale cu amplitudine de 6,55 nm.
MCS
Mars Climate Sounder ( MCS ) este un spectrometru cu 9 canale care funcționează în vizibil și în infraroșu, un canal funcționează la 0,3-3 micrometri, iar celelalte opt funcționează între 12 și 50 micrometri. Aceste canale au fost alese pentru a măsura temperatura, presiunea, vaporii de apă și nivelul prafului.
Instrumentul va observa orizontul lui Marte împărțindu-l în benzi verticale și analizându-le separat. Fiecare bandă are o grosime de 5 km.
Aceste măsurători vor fi combinate pentru a genera hărți zilnice ale timpului marțian. Aceste hărți vor arăta schimbări de temperatură, presiune, umiditate și densitate.
SHARAD
Radarul Radar Shasow Subsurface Radar ( SHARAD ) a fost conceput pentru a studia interiorul polilor marțieni. Instrumentul ar trebui să poată studia diferitele straturi de gheață și rocă ale polilor și, dacă este prezent, să identifice apa lichidă care, dacă este suficient de aproape de suprafață, ar putea fi utilizată în viitoarele misiuni spațiale.
SHARAD funcționează folosind unde radio cu frecvențe cuprinse între 10 și 30 MHz. Are o rezoluție verticală de 7 metri și o adâncime de analiză de 1 km. Are o rezoluție de analiză orizontală mică, între 0,3 și 3 km. SHARAD este proiectat să funcționeze împreună cu radarul MARSIS al sondei ESA Mars Express . MARSIS are o rezoluție scăzută, dar o capacitate mare de a pătrunde în sol. Ambele instrumente au fost promovate de Agenția Spațială Italiană, iar SHARAD a fost construit de Alenia Spazio .
Instrumente complementare
Analiza câmpului gravitațional
Variațiile câmpului gravitațional de pe Marte pot fi deduse din variația vitezei MRO . Viteza MRO va fi determinată folosind deplasarea Doppler a semnalului radio pe care nava spațială îl va trimite pe Pământ.
Analiza densității atmosferice
Accelerometrele sensibile instalate la bordul Orbiter au fost utilizate pentru a identifica variațiile densității atmosferice în timpul fazei de frânare aeriană.
Experimente tehnologice
Electra
Electra este o antenă UHF , este proiectată pentru a comunica cu viitoarele misiuni spațiale în timpul aterizării, pentru a le facilita coborârea.
Camera de navigare optică va încadra imaginea lui Fobos și Deimos pe fundalul înstelat și va utiliza aceste imagini pentru a determina orbita actuală a sondei. Această componentă nu este esențială pentru nava spațială, a fost inclusă pentru a verifica bunătatea tehnologiei, astfel încât să poată fi utilizată în viitoarele misiuni spațiale pentru a permite o inserare orbitală mai bună sau aterizarea acesteia.
Date tehnice

Structura
Lucrătorii de la Lockheed Martin Space Systems din Denver au asamblat structura navei spațiale și au asamblat instrumentele. Instrumentele științifice au fost construite de Universitatea din Arizona , Tucson, Laboratorul de Fizică Aplicată al Universității Johns Hopkins , Laurel, Md, Agenția Spațială Italiană , Roma , Malin Space Science Systems , San Diego, California și Jet Propulsion Laboratory .
Structura este din carbon compozit și aluminiu . Carcasa este fabricată din titan și ocupă cea mai mare parte a volumului sondei. Rezervorul reprezintă cea mai mare parte a greutății sondei, dar oferă, de asemenea, integritate structurală sondei.
- Greutatea totală este mai mică de 2.180 kilograme
- Masa fără combustibil este de 1.031 kilograme
Sistem de alimentare

Orbiterul de recunoaștere al Marte își primește toată energia electrică de la două panouri solare . Fiecare panou solar este capabil să se deplaseze independent pe cele două axe (rotire sus, jos, dreapta sau stânga). Fiecare panou măsoară 5,35 × 2,53 m, iar suprafața este acoperită pentru 9,5 m² de 3744 de celule fotovoltaice. Aceste celule fotovoltaice sunt foarte eficiente, de fapt sunt capabile să transforme 26% din lumina soarelui în curent electric. Celulele sunt conectate pentru a produce 32 de volți, tensiunea necesară pentru majoritatea echipamentelor montate pe sondă. Pe orbita lui Marte, panourile vor putea produce 2000 W, în timp ce pe orbita Pământului sunt capabile să producă 6000 W.
Mars Reconnaissance Orbiter folosește două baterii reîncărcabile hibrid nichel metan. Aceste baterii sunt utilizate ca sursă de alimentare atunci când panourile solare nu sunt poziționate spre Soare (în timpul lansării, introducerea pe orbită și frânarea aeriană) și atunci când orbita lui Marte ascunde Soarele. Fiecare baterie este capabilă să stocheze acum 50 de amperi . Sonda nu poate utiliza întreaga putere a bateriilor, deoarece în timpul descărcării acestora, tensiunea scade și dacă aceasta scade sub 20 de volți, computerele ar înceta să funcționeze. Deci, se așteaptă ca sonda să utilizeze aproximativ 40% din puterea bateriei.
Sistem electronic
Calculatorul principal al Mars Reconnaissance Orbiter folosește un microprocesor de tranzistor de 10,4 milioane, RAD750 . Acest procesor rulează la 133 MHz și nu este altceva decât un PowerPC G3 modificat pentru a rezista radiației spațiului. Acest procesor, în comparație cu procesoarele moderne, este extrem de lent, dar principala sa caracteristică este aceea de a rezista radiațiilor spațiale (întărirea rad), cum ar fi particulele de vânt solar și razele cosmice.
Datele sunt stocate într-o memorie flash de 20 GB constând din 780 cipuri [ fără sursă ] , fiecare cu o capacitate de 256 Mb. Această memorie este suficient de mică pentru instrumentele de sondă atunci când considerați că o singură imagine HiRISE ocupă 3,5 GB. [5]
Sistemul de operare utilizat este VxWorks , este echipat cu multe protocoale de protecție și monitorizare împotriva defecțiunilor.
Sistemul de navigație care utilizează datele senzorilor săi detectează poziția și altitudinea în timpul misiunii.
- Șaisprezece senzori detectează poziția Soarelui (opt sunt în rezervă). Acestea sunt aranjate în jurul sondei și măsoară direcția razelor solare pentru a permite sistemului să calculeze orientarea sondei.
- Doi senzori urmăresc traiectoria stelelor și sunt folosiți pentru a determina altitudinea și orientarea sondei. Senzorii sunt camere digitale simple legate de o bază de date astronomică.
- Două manometre inerțiale sunt instalate în sondă (al doilea este o rezervă). Acestea oferă date despre mișcarea sondei. Contoarele inerțiale sunt utilizate împreună cu cele trei accelerometre și cele trei giroscopii laser cu inel.
Sistem de telecomunicații

Subsistemul de telecomunicații folosește o antenă mare pentru a transmite în spațiu profund cu frecvența normală de comunicație în banda X de 8 GHz. Aceeași antenă va fi utilizată pentru a încerca să transmită în banda Ka de 32 GHz. Această nouă bandă va permite o legătură la bandă largă, deoarece ar trebui să poată transmite până la 6 Mb / s. Sunt instalate două amplificatoare de bandă X de 100W, al doilea este de rezervă. Este instalat un amplificator pentru banda Ka, puterea sa este de 35 W. Două transpondere sunt instalate în sondă.
Două antene mici cu câștig redus sunt utilizate pentru comunicații lente în timpul situațiilor de urgență sau în cazuri speciale, cum ar fi inserarea orbitală. Aceste antene nu sunt echipate cu un vas, deoarece sunt omnidirecționale.
Sistem de propulsie
Rezervorul conține 1175 litri de combustibil. Este umplut cu 1187 kilograme de hidrazină , presiunea combustibilului este reglată prin adăugarea de heliu sub presiune stocată într-un rezervor extern. Șaptezeci la sută din combustibil va fi utilizat pentru inserția orbitală.
Nava spațială are 20 de propulsoare de rachete .
- Pentru inserția orbitală se vor utiliza 6 propulsoare principale. Fiecare propulsor este capabil să dezvolte 170 Newtoni de forță, în total 1020 Newtoni.
- Se vor utiliza 6 propulsoare medii pentru manevrele de corecție a orbitei în timpul inserției orbitale. Fiecare propulsor generează 22 de Newtoni de forță.
- 8 propulsoare mici, vor fi utilizate pentru reglarea înălțimii și pentru operațiuni normale. Fiecare propulsor generează 0,9 newtoni.
Patru giroscopuri sunt folosite pentru a menține sonda stabilă, de fapt, în timpul achiziționării imaginilor de înaltă definiție, orice ușoară oscilație ar face imaginea neclară. Fiecare giroscop este utilizat pentru gestionarea unei axe; al patrulea este în rezervă, în cazul în care unul dintre celelalte trei eșuează. Fiecare giroscop cântărește 10 kilograme și este capabil de 6000 de rotații pe minut.
Notă
- ^ (EN) NASA Lands Car-Size Rover Beside Martian Mountain , pe nasa.gov, NASA . Accesat la 6 august 2012 .
- ^ (EN) Mars Orbiter al NASA efectuează corectarea cu succes a cursului pe jpl.nasa.gov, NASA . Adus pe 19 aprilie 2020 .
- ^ "Mars Reconnaissance Orbiter Reaches Planned Flight Path" , pe JPL . Adus pe 13 septembrie .
- ^ Cronologie a misiunii de pe site-ul Jet Propulsion Laboratory .
- ^ (EN) Parts Spacecraft Parts: Command and Data Handling Systems- pe marsprogram.jpl.nasa.gov. Adus la 11 iunie 2008 (arhivat din original la 5 aprilie 2008) .
Elemente conexe
Alte proiecte
-
 Wikimedia Commons conține imagini sau alte fișiere despre Mars Reconnaissance Orbiter
Wikimedia Commons conține imagini sau alte fișiere despre Mars Reconnaissance Orbiter
-
 Wikinews conține articolul Mars Reconaissance Orbiter început , 12 august 2005
Wikinews conține articolul Mars Reconaissance Orbiter început , 12 august 2005
linkuri externe
- ( RO ) Site-ul oficial , la marsprogram.jpl.nasa.gov .
- (EN) Mars Reconnaissance Orbiter , de Encyclopedia Britannica , Encyclopædia Britannica, Inc.
- (RO) Website pe instrumentul HiRISE de pe marsoweb.nas.nasa.gov.
- ( RO ) Informații de la ILS privind lansarea vehiculului AV-007 , la ilslaunch.com .
