În calculul diferențial vectorial , rotorul unui câmp vectorial tridimensional este un operator diferențial față de un câmp vectorial tridimensional {\ displaystyle \ mathbf {A}}  se potrivește cu un alt câmp vector notat de obicei cu {\ displaystyle \ nabla \ times \ mathbf {A}}
se potrivește cu un alt câmp vector notat de obicei cu {\ displaystyle \ nabla \ times \ mathbf {A}}  . În termeni intuitivi, exprimă o rotație infinitesimală (adică o viteză de rotație) a vectorului dat, asociind un vector fiecărui punct al spațiului.
. În termeni intuitivi, exprimă o rotație infinitesimală (adică o viteză de rotație) a vectorului dat, asociind un vector fiecărui punct al spațiului.
Este un vector aliniat cu axa de rotație; direcția sa este în concordanță cu cea de rotație conform regulii din dreapta și lungimea sa este valoarea circuitului câmpului ( integrarea sa de-a lungul unei căi închise) per unitate de suprafață, adică în limita în care curba de integrare este fierbinte până la un punct.
De exemplu, dacă viteza particulelor care formează un fluid este considerată câmpul vector, rotorul câmpului vector este densitatea circulației fluidului. Câmpurile vectoriale care au rotor zero pe domeniul lor se numesc irotaționale .
Rotorul, indicat cu {\ displaystyle \ nabla \ times}  , măsoară componenta maximă de rotație a planului în dezvoltarea Taylor a unui câmp vector de ordinul întâi, adică în liniarizarea câmpului în 3 dimensiuni. Prin urmare, este un tip de derivare a unui câmp vector. Integrarea relativă are loc prin teorema rotorului , un caz particular al teoremei lui Stokes , care leagă integralul de suprafață {\ displaystyle S}
, măsoară componenta maximă de rotație a planului în dezvoltarea Taylor a unui câmp vector de ordinul întâi, adică în liniarizarea câmpului în 3 dimensiuni. Prin urmare, este un tip de derivare a unui câmp vector. Integrarea relativă are loc prin teorema rotorului , un caz particular al teoremei lui Stokes , care leagă integralul de suprafață {\ displaystyle S}  a rotorului de câmp vector cu integrala de linie a câmpului vectorial de-a lungul limitei {\ displaystyle \ partial S}
a rotorului de câmp vector cu integrala de linie a câmpului vectorial de-a lungul limitei {\ displaystyle \ partial S}  din {\ displaystyle S} .
din {\ displaystyle S} .
Spre deosebire de gradient și divergență , generalizarea rotorului la spații mai mari de trei dimensiuni nu este posibilă. Există unele generalizări, dar numai în spații tridimensionale (chiar ne-euclidiene precum varietățile Riemanniene tridimensionale) definiția geometrică a rotorului unui câmp vector oferă un alt câmp vectorial. Din acest punct de vedere, rotorul are proprietăți similare cu cele ale produsului vector .
Interpretare intuitivă
Să presupunem că un câmp vectorial (tridimensional) {\ displaystyle \ mathbf {F}}  descrie viteza unui fluid (nu este perfectă). Imaginând să fixeze centrul unei sfere mici într-un punct, dacă această sferă are o suprafață aspră, atunci va începe să se rotească pe ea însăși, mișcată de fluxul fluidului. Rotorul {\ displaystyle \ nabla \ times \ mathbf {F}}
descrie viteza unui fluid (nu este perfectă). Imaginând să fixeze centrul unei sfere mici într-un punct, dacă această sferă are o suprafață aspră, atunci va începe să se rotească pe ea însăși, mișcată de fluxul fluidului. Rotorul {\ displaystyle \ nabla \ times \ mathbf {F}}  evaluat în centrul sferei este un vector a cărui direcție este axa de rotație a sferei și lungimea acesteia este jumătate din valoarea absolută a momentului unghiular al sferei. Mai mult, direcția de rotație este asociată vectorului în conformitate cu regula din partea dreaptă .
evaluat în centrul sferei este un vector a cărui direcție este axa de rotație a sferei și lungimea acesteia este jumătate din valoarea absolută a momentului unghiular al sferei. Mai mult, direcția de rotație este asociată vectorului în conformitate cu regula din partea dreaptă .
Definiție
Sub ipoteza că un câmp vector {\ displaystyle \ mathbf {F}} amândoi clasici {\ displaystyle C ^ {1}}  [1] , rotorul {\ displaystyle \ nabla \ times \ mathbf {F}} din {\ displaystyle \ mathbf {F}} este definit în fiecare punct prin proiecția sa pe o unitate vectorială {\ displaystyle \ mathbf {\ hat {n}}}
[1] , rotorul {\ displaystyle \ nabla \ times \ mathbf {F}} din {\ displaystyle \ mathbf {F}} este definit în fiecare punct prin proiecția sa pe o unitate vectorială {\ displaystyle \ mathbf {\ hat {n}}}  din {\ displaystyle \ mathbb {R} ^ {3}}
din {\ displaystyle \ mathbb {R} ^ {3}}  locul în punct: este valoarea integralei de linie {\ displaystyle \ oint _ {C} \ mathbf {F} \ cdot d \ mathbf {r}}
locul în punct: este valoarea integralei de linie {\ displaystyle \ oint _ {C} \ mathbf {F} \ cdot d \ mathbf {r}}  a câmpului într-un plan ortogonal a {\ displaystyle \ mathbf {\ hat {n}}} în limita unde curba {\ displaystyle C}
a câmpului într-un plan ortogonal a {\ displaystyle \ mathbf {\ hat {n}}} în limita unde curba {\ displaystyle C}  integrării este redusă la un punct, adică în limita în care zona {\ displaystyle A}
integrării este redusă la un punct, adică în limita în care zona {\ displaystyle A}  legat de {\ displaystyle C} tinde să se anuleze, împărțit la zonă {\ displaystyle | A |}
legat de {\ displaystyle C} tinde să se anuleze, împărțit la zonă {\ displaystyle | A |}  :
:
- {\ displaystyle (\ nabla \ times \ mathbf {F}) \ cdot \ mathbf {\ hat {n}} \ {\ overset {\ underset {\ mathrm {def}} {}} {=}} \ lim _ { A \ to 0} \ left ({\ frac {1} {| A |}} \ oint _ {C} \ mathbf {F} \ cdot d \ mathbf {r} \ right).}

Este o scriere a teoremei rotorului și se poate interpreta produsul scalar între {\ displaystyle \ nabla \ times \ mathbf {F}} și vectorul unitar {\ displaystyle \ mathbf {n}}  ca densitate de circulație a suprafeței câmpului {\ displaystyle \ mathbf {F}} în jurul direcției {\ displaystyle \ mathbf {\ hat {n}}} .
ca densitate de circulație a suprafeței câmpului {\ displaystyle \ mathbf {F}} în jurul direcției {\ displaystyle \ mathbf {\ hat {n}}} .
Atâta timp cât {\ displaystyle \ mathbb {R} ^ {3}} este un spațiu cu metrică euclidiană, într-un sistem de coordonate curviline ortogonale {\ displaystyle (u_ {1}, u_ {2}, u_ {3})}  , cum ar fi coordonatele carteziene , sferice , cilindrice , eliptice sau parabolice , a treia componentă a rotorului {\ displaystyle \ mathbf {F} = (F_ {1}, F_ {2}, F_ {3})}
, cum ar fi coordonatele carteziene , sferice , cilindrice , eliptice sau parabolice , a treia componentă a rotorului {\ displaystyle \ mathbf {F} = (F_ {1}, F_ {2}, F_ {3})}  este dat de:
este dat de:
- {\ displaystyle (\ nabla \ times \ mathbf {F}) \, _ {3} = {\ frac {1} {h_ {1} h_ {2}}} \ left ({\ frac {\ partial (h_ { 2} F_ {2})} {\ partial u_ {1}}} - {\ frac {\ partial (h_ {1} F_ {1})} {\ partial u_ {2}}} \ right).}

Celelalte două componente ale rotorului (prima și a doua, în ordine) sunt obținute din permutarea ciclică a indicilor: 3,1,2 → 1,2,3 → 2,3,1.
Dacă, de exemplu, {\ displaystyle (x_ {1}, x_ {2}, x_ {3})}  sunt coordonatele carteziene și {\ displaystyle (u_ {1}, u_ {2}, u_ {3})} sunt coordonate curviline ortogonale, avem:
sunt coordonatele carteziene și {\ displaystyle (u_ {1}, u_ {2}, u_ {3})} sunt coordonate curviline ortogonale, avem:
- {\ displaystyle h_ {i} = {\ sqrt {\ sum \ limits _ {j = 1} ^ {3} \ left ({\ frac {\ partial x_ {j}} {\ partial u_ {i}}} \ dreapta) ^ {2}}}.}

Într-un sistem general de coordonate curvilinee, {\ displaystyle (u ^ {k})}  , rotorul este dat de [2] :
, rotorul este dat de [2] :
- {\ displaystyle (\ nabla \ times \ mathbf {F}) ^ {k} = e ^ {k \ ell m} \ nabla _ {\ ell} F_ {m} \ ,,}

unde s-a folosit notația lui Einstein și {\ displaystyle e ^ {k \ ell m}}  denotă tensorul Levi-Civita (care este simbolul Levi-Civita înmulțit cu rădăcina pătrată a metricei euclidiene exprimată în orice coordonate curvilinee) și {\ displaystyle \ nabla _ {\ ell}}
denotă tensorul Levi-Civita (care este simbolul Levi-Civita înmulțit cu rădăcina pătrată a metricei euclidiene exprimată în orice coordonate curvilinee) și {\ displaystyle \ nabla _ {\ ell}}  denotă derivatul covariant . Echivalent,
denotă derivatul covariant . Echivalent,
- {\ displaystyle (\ nabla \ times \ mathbf {F}) = \ mathbf {e} _ {k} e ^ {k \ ell m} \ nabla _ {l} F_ {m} \ ,,}

unde este {\ displaystyle \ mathbf {e} _ {k}}  sunt câmpurile vectoriale de coordonate, asociate cu sistemul general de coordonate curvilinee, adică {\ displaystyle \ mathbf {e} _ {k} = {\ partial \ over {\ partial u ^ {k}}}}
sunt câmpurile vectoriale de coordonate, asociate cu sistemul general de coordonate curvilinee, adică {\ displaystyle \ mathbf {e} _ {k} = {\ partial \ over {\ partial u ^ {k}}}}  .
.
Folosind în schimb derivatul extern :
- {\ displaystyle \ nabla \ times \ mathbf {F} = \ left [\ star \ left ({\ mathbf {d}} F ^ {\ flat} \ right) \ right] ^ {\ sharp},}
![{\ displaystyle \ nabla \ times \ mathbf {F} = \ left [\ star \ left ({\ mathbf {d}} F ^ {\ flat} \ right) \ right] ^ {\ sharp},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/97f803122d315f8a2d75e19f65a9794b706428cf)
unde este {\ displaystyle \ flat}  Și {\ displaystyle \ sharp}
Și {\ displaystyle \ sharp}  sunt izomorfisme muzicale e {\ displaystyle \ star}
sunt izomorfisme muzicale e {\ displaystyle \ star}  este dualitatea lui Hodge .
este dualitatea lui Hodge .
Această ultimă formulare este valabilă într-un sistem de coordonate generic și permite extinderea rotorului la varietăți Riemanniene tridimensionale orientate. Deoarece depinde de orientarea colectorului, rotorul este un operator chiral : dacă se schimbă orientarea, se schimbă și direcția rotorului.
Coordonatele carteziene
În coordonate carteziene, ziceri {\ displaystyle \ mathbf {i}}  , {\ displaystyle \ mathbf {j}}
, {\ displaystyle \ mathbf {j}}  , Și {\ displaystyle \ mathbf {k}}
, Și {\ displaystyle \ mathbf {k}}  vectorii unitari ai axelor, rotorul unui camp vectorial {\ displaystyle \ mathbf {F} = (F_ {x}, F_ {y}, F_ {z})}
vectorii unitari ai axelor, rotorul unui camp vectorial {\ displaystyle \ mathbf {F} = (F_ {x}, F_ {y}, F_ {z})}  este câmpul vector {\ displaystyle \ nabla \ times \ mathbf {F}} definit de:
este câmpul vector {\ displaystyle \ nabla \ times \ mathbf {F}} definit de:
- {\ displaystyle \ nabla \ times \ mathbf {F} = {\ begin {vmatrix} \ mathbf {i} & \ mathbf {j} & \ mathbf {k} \\\\ {\ frac {\ partial} {\ partial x}} & {\ frac {\ partial} {\ partial y}} & {\ frac {\ partial} {\ partial z}} \\\\ F_ {x} & F_ {y} & F_ {z} \ end {vmatrix}} = {\ begin {vmatrix} 0 & {- {\ frac {\ partial} {\ partial z}}} & {\ frac {\ partial} {\ partial y}} \\\\ {\ frac {\ partial} {\ partial z}} & 0 & {- {\ frac {\ partial} {\ partial x}}} \\\\ {- {\ frac {\ partial} {\ partial y}}} & {\ frac {\ partial} {\ partial x}} & 0 \ end {vmatrix}} \ mathbf {F},}

unde în a doua egalitate ecuația matricei este făcută explicită, în timp ce în prima scriere indică determinantul formal al matricei; referindu-ne la expresiile valabile într-un spațiu euclidian menționat mai sus, se obține cel mai simplu caz (cel cu: {\ displaystyle a_ {i} = 1}  ):
):
- {\ displaystyle \ nabla \ times \ mathbf {F} = \ mathbf {i} \ left ({\ frac {\ partial F_ {z}} {\ partial y}} - {\ frac {\ partial F_ {y}} {\ partial z}} \ right) + \ mathbf {j} \ left ({\ frac {\ partial F_ {z}} {\ partial x}} - {\ frac {\ partial F_ {x}} {\ partial z}} \ right) + \ mathbf {k} \ left ({\ frac {\ partial F_ {y}} {\ partial x}} - {\ frac {\ partial F_ {x}} {\ partial y}} \ dreapta).}

Coordonate cilindrice
Dacă, pe de altă parte, luăm un sistem de referință în coordonate cilindrice în spațiul euclidian {\ displaystyle (x = \ rho \ cos \ phi, y = \ rho \ sin \ phi, z = z)}  , rotorul de {\ displaystyle \ mathbf {F} (\ rho, \ phi, z) = \ mathbf {e} _ {\ rho} \ F _ {\ rho} + \ mathbf {e} _ {\ phi} \ F _ { \ phi} + \ mathbf {e} _ {z} \ F_ {z}}
, rotorul de {\ displaystyle \ mathbf {F} (\ rho, \ phi, z) = \ mathbf {e} _ {\ rho} \ F _ {\ rho} + \ mathbf {e} _ {\ phi} \ F _ { \ phi} + \ mathbf {e} _ {z} \ F_ {z}}  este dat de:
este dat de:
- {\ displaystyle \ nabla \ times \ mathbf {F} = \ mathbf {e} _ {\ rho} \ \ left ({\ frac {1} {\ rho}} {\ frac {\ partial F_ {z}} { \ partial \ phi}} - {\ frac {\ partial F _ {\ phi}} {\ partial z}} \ right) + \ mathbf {e} _ {\ phi} \ \ left ({\ frac {\ partial F_ {\ rho}} {\ partial z}} - {\ frac {\ partial F_ {z}} {\ partial \ rho}} \ right) + \ mathbf {e} _ {z} \ {\ frac {1 } {\ rho}} \ left ({\ frac {\ partial (\ rho F _ {\ phi})} {\ partial \ rho}} - {\ frac {\ partial F _ {\ rho}} {\ partial \ phi}} \ right).}

Rotorul ca derivat extern
La un câmp vector {\ displaystyle \ mathbf {F} = (F_ {x}, F_ {y}, F_ {z})} în spațiu putem asocia o diferențială 1-formă corespunzătoare
- {\ displaystyle \ omega = F_ {x} \ mathrm {d} x + F_ {y} \ mathrm {d} y + F_ {z} \ mathrm {d} z,}

atunci derivatul său extern se dovedește a fi forma 2
- {\ displaystyle \ mathrm {d} \ omega = \ left ({\ frac {\ partial F_ {z}} {\ partial y}} - {\ frac {\ partial F_ {y}} {\ partial z}} \ dreapta) dy \ wedge dz + \ left ({\ frac {\ partial F_ {x}} {\ partial z}} - {\ frac {\ partial F_ {z}} {\ partial x}} \ right) dz \ wedge dx + \ left ({\ frac {\ partial F_ {y}} {\ partial x}} - {\ frac {\ partial F_ {x}} {\ partial y}} \ right) dx \ wedge dy}

- {\ displaystyle = (\ nabla \ times \ mathbf {F}) _ {x} dy \ wedge dz + (\ nabla \ times \ mathbf {F}) _ {y} dz \ wedge dx + (\ nabla \ times \ mathbf {F}) _ {z} dx \ wedge dy.}

Identități vectoriale
În cele ce urmează, câmpurile vectoriale și scalare implicate vor fi de clasă {\ displaystyle C ^ {2}}  .
.
În coordonatele carteziene se arată că {\ displaystyle \ nabla \ times (\ mathbf {v \ times \ mathbf {F}})}  Este egal cu:
Este egal cu:
- {\ displaystyle \ nabla \ times \ left (\ mathbf {v \ times F} \ right) = \ left [\ left (\ mathbf {\ nabla \ cdot F} \ right) + \ mathbf {F \ cdot \ nabla} \ right] \ mathbf {v} - \ left [\ left (\ mathbf {\ nabla \ cdot v} \ right) + \ mathbf {v \ cdot \ nabla} \ right] \ mathbf {F}}
![\ nabla \ times \ left (\ mathbf {v \ times F} \ right) = \ left [\ left (\ mathbf {\ nabla \ cdot F} \ right) + \ mathbf {F \ cdot \ nabla} \ right] \ mathbf {v} - \ left [\ left (\ mathbf {\ nabla \ cdot v} \ right) + \ mathbf {v \ cdot \ nabla} \ right] \ mathbf {F}](https://wikimedia.org/api/rest_v1/media/math/render/svg/aea575600713a03516d075a48a1cb90d69337760)
iar dacă inversăm câmpul vector și {\ displaystyle \ nabla}  :
:
- {\ displaystyle \ mathbf {v \ \ times} \ left (\ mathbf {\ nabla \ times F} \ right) = \ nabla _ {F} \ left (\ mathbf {v \ cdot F} \ right) - \ left (\ mathbf {v \ cdot \ nabla} \ right) \ mathbf {F}}

unde este {\ displaystyle \ nabla _ {F}}  înseamnă că gradientul acționează numai asupra {\ displaystyle \ mathbf {F}} .
înseamnă că gradientul acționează numai asupra {\ displaystyle \ mathbf {F}} .
Întotdeauna în coordonate carteziene, {\ displaystyle \ nabla \ times (\ nabla \ times \ mathbf {F})}  este dat de:
este dat de:
- {\ displaystyle \ nabla \ times \ left (\ mathbf {\ nabla \ times F} \ right) = \ mathbf {\ nabla} (\ mathbf {\ nabla \ cdot F}) - \ nabla ^ {2} \ mathbf { F}}

unde este {\ displaystyle \ nabla ^ {2} \ mathbf {F}}  este vectorul Laplacian al {\ displaystyle \ mathbf {F}} . Această relație poate fi văzută ca un caz particular al celei anterioare prin substituirea lui v → ∇.
este vectorul Laplacian al {\ displaystyle \ mathbf {F}} . Această relație poate fi văzută ca un caz particular al celei anterioare prin substituirea lui v → ∇.
Rotorul de gradient al unui câmp scalar {\ displaystyle \ phi}  este nul:
este nul:
- {\ displaystyle \ nabla \ times (\ nabla \ phi) = {\ vec {0}}}
 , caz în care câmpul scalar {\ displaystyle \ phi} , precum și câmpul vector irotațional {\ displaystyle \ nabla \ phi}
, caz în care câmpul scalar {\ displaystyle \ phi} , precum și câmpul vector irotațional {\ displaystyle \ nabla \ phi}  , sunt definite într-un set simplu conectat, așa cum este definit de lema lui Poincaré , atunci {\ displaystyle \ phi} este potențialul scalar al câmpului vectorial conservator{\ displaystyle - \ nabla \ phi}
, sunt definite într-un set simplu conectat, așa cum este definit de lema lui Poincaré , atunci {\ displaystyle \ phi} este potențialul scalar al câmpului vectorial conservator{\ displaystyle - \ nabla \ phi}  .
.
în timp ce dacă {\ displaystyle \ varphi}  este o funcție scalară și {\ displaystyle \ mathbf {F}} un câmp vector:
este o funcție scalară și {\ displaystyle \ mathbf {F}} un câmp vector:
- {\ displaystyle \ nabla \ times (\ varphi \ mathbf {F}) = \ nabla \ varphi \ times \ mathbf {F} + \ varphi \ nabla \ times \ mathbf {F}.}

Exemplu
Luați în considerare următorul câmp vector , care este tangent la cercurile concentrice axei {\ displaystyle z}  și a căror intensitate crește liniar cu distanța față de acesta; în coordonate carteziene:
și a căror intensitate crește liniar cu distanța față de acesta; în coordonate carteziene:
- {\ displaystyle \ mathbf {F} (x, y, z) = y {\ boldsymbol {\ hat {x}}} - x {\ boldsymbol {\ hat {y}}}.}

în timp ce în coordonate cilindrice (mai confortabil în acest caz, având în vedere simetriile câmpului):
- {\ displaystyle \ mathbf {F} (\ rho, \ phi, z) = - {\ rho} \ mathbf {e} _ {\ phi}}

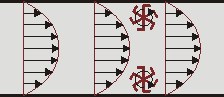
O reprezentare a acestuia în plan cartezian (până la un factor de reducere a scării) este:
Dintr-o simplă inspecție vizuală, se poate observa doar că câmpul „se rotește”, dar, de asemenea, observând că intensitatea acestuia crește odată cu distanța față de axă, se poate aștepta că este capabil, la nivel local, să învârtă o minge plasată în fiecare punct, conform regulii din dreapta (direcția rotorului intră în pagină: folosind un sistem de coordonate cartezian standard, aceasta corespunde cu direcția z-urilor negative). Testul analitic se face prin calcularea rotorului; în coordonate carteziene:
- {\ displaystyle \ mathbf {\ nabla} \ times \ mathbf {F} = 0 {\ boldsymbol {\ hat {x}}} + 0 {\ boldsymbol {\ hat {y}}} + \ left [{\ frac { \ partial} {\ partial x}} (- x) - {\ frac {\ partial} {\ partial y}} y \ right] {\ boldsymbol {\ hat {z}}} = - 2 {\ boldsymbol {\ pălărie {z}}}.}
![{\ displaystyle \ mathbf {\ nabla} \ times \ mathbf {F} = 0 {\ boldsymbol {\ hat {x}}} + 0 {\ boldsymbol {\ hat {y}}} + \ left [{\ frac { \ partial} {\ partial x}} (- x) - {\ frac {\ partial} {\ partial y}} y \ right] {\ boldsymbol {\ hat {z}}} = - 2 {\ boldsymbol {\ pălărie {z}}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1bcd50657101c6989b915c4b8ee86b85b5d3cc7a)
în timp ce în coordonate cilindrice:
- {\ displaystyle \ mathbf {\ nabla} \ times \ mathbf {F} = \ mathbf {e} _ {z} \ {\ frac {1} {\ rho}} \ left ({\ frac {\ partial (\ rho F _ {\ phi})} {\ partial \ rho}} \ right) = - 2 \ mathbf {e} _ {z} \.}

În acest caz, rotorul este același în tot spațiul, indiferent de punctul luat în considerare și, prin urmare, cantitatea de rotație în câmpul vectorial considerat este aceeași peste tot. Prin urmare, reprezentarea sa simplă în spațiul cartezian este:
Notă
- ^ Din punct de vedere fizic, diferențialitatea câmpului vector implică faptul că operatorul rotorului este utilizat în fizica non-cuantică, adică în fizica clasică (inclusiv relativitatea)
- ^ (EN) Eric W. Weisstein, Curl , în MathWorld , Wolfram Research.
Bibliografie
- ( EN ) Arfken, George B. și Hans J. Weber. Metode matematice pentru fizicieni , presa academică; Ediția 6 (21 iunie 2005). ISBN 978-0-12-059876-2 .
- ( EN ) Korn, Granino Arthur și Theresa M. Korn, Mathematical Handbook for Scientists and Engineers: Definitions, Theorems, and Formulas for Reference and Review , New York, Dover Publications, pp. 157-160, ISBN 0-486-41147-8 .
- (EN) Kaplan, W. "Bucla unui câmp vector." §3.5 în Calcul avansat, ediția a IV-a . Reading, MA: Addison-Wesley, pp. 186–187, 1991.
- ( EN ) Morse, PM și Feshbach, H. "Curl". În Metode de fizică teoretică, Partea I. New York: McGraw-Hill, pp. 39-42, 1953.
- (EN) Schey, HM Div, Grad, Curl, and All That: An Informal Text On Vector Calculus, ed. A 3-a. New York: WW Norton, 1997.
Elemente conexe
linkuri externe