Sistem de coordonate polare
În matematică , sistemul de coordonate polare este un sistem de coordonate bidimensional în care fiecare punct al planului este identificat printr-un unghi și o distanță față de un punct fix numit pol.
Sistemul de coordonate polare este util în special în cazurile în care relațiile dintre două puncte pot fi exprimate mai ușor în termeni de unghiuri și distanță; în sistemul de coordonate cartezian mai cunoscut sau sistemul de coordonate dreptunghiular, această relație poate fi exprimată numai prin funcții trigonometrice .
Deoarece sistemul de coordonate este bidimensional, fiecare punct este determinat de două coordonate polare: coordonata radială și coordonata unghiulară. Primul, de obicei identificat cu litera , denotă distanța punctului de la un punct fix numit pol (echivalent cu originea sistemului cartesian ). Coordonata unghiulară, notată de obicei cu litera greacă θ, se mai numește unghiul azimut și identifică unghiul pe care raza la 0 ° trebuie să-l măture în sens invers acelor de ceasornic pentru a se suprapune peste cel care leagă punctul de pol.

Istorie
Conceptele de unghi și raza au fost deja utilizate de către popoarele antice din primul mileniu î.Hr. Grecul astronomul Hipparchus de la Niceea ( 190 de - 120 de BC ) a construit un tabel al funcțiilor șirurile , care au furnizat lungimea șirului subîntins de fiecare unghi; există, de asemenea, referiri la utilizarea coordonatelor polare pentru stabilirea pozițiilor stelelor .
În eseul Despre spirale , Arhimede descrie celebra sa spirală , o funcție a cărei rază depinde de unghi. Lucrarea grecilor nu s-a extins însă la un sistem de coordonate polare universal acceptat.
Spre mijlocul secolului al XVII-lea , Grigorie de San Vincenzo și Bonaventura Cavalieri au introdus, independent unul de celălalt, conceptul de coordonate polare. Flamandul Gregorio di San Vincenzo a expus acest concept în Opus geometricus din 1647 , dar se crede că el a fost conștient de acesta din 1625 . Cavalieri și-a publicat opera în 1635 , dar o ediție mai corectă a fost tipărită în 1653 . Cavalieri a fost primul care a folosit coordonatele polare pentru a rezolva problemele legate de calculul suprafeței subtendute de o spirală a lui Arhimede . Pascal a folosit ulterior coordonatele polare pentru a calcula lungimea arcurilor parabolice .
În Metoda pentru calcul diferențial (scrisă în 1671 și publicată în 1736 ), Isaac Newton a examinat transformările care au avut loc între coordonatele polare și cele care existau între alte nouă sisteme de coordonate.
În ziarul Acta Eruditorum din 1691, Jacob Bernoulli a folosit sistemul cu un punct și o linie, pe care le-a numit pol și respectiv axă polară . Coordonatele au fost specificate de distanța față de pol și de unghiul format cu axa polară; Lucrarea lui Bernoulli s-a extins la calculul razei de curbură a curbelor, exprimată în aceste coordonate.
Termenul de coordonate polare a fost atribuit lui Gregorio Fontana și a fost folosit de scriitorii italieni din secolul al XVIII-lea . Alexis Clairaut a fost primul care s-a gândit la coordonatele polare în trei dimensiuni , iar Euler a fost primul care le-a dezvoltat efectiv.
Identificarea punctelor în coordonate polare
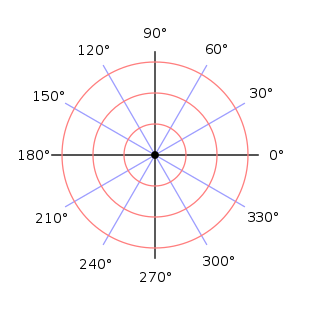
Fiecare punct al sistemului de coordonate polare poate fi descris cu cele două coordonate polare, denumite de obicei (coordonată radială) și θ (coordonată unghiulară). Coordonata reprezintă distanța radială de la pol, în timp ce θ este unghiul în sens invers acelor de ceasornic care trebuie parcurs de la 0 ° (axa de referință).
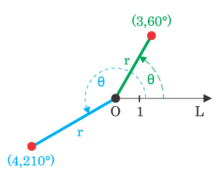
De exemplu, coordonatele polare (3, 60 °) trebuie trasate cu un punct plasat la trei unități distanță de pol și în așa fel încât raza care leagă punctul de pol să formeze un unghi de 60 ° cu axa de referință. Este evident că punctul (3, -300 °) va coincide cu punctul anterior, deoarece unghiul -300 ° corespunde exact unghiului de 60 °; pentru aceeași proprietate a unghiurilor, de asemenea, toate punctele (3, 60 ° + K × 360 °), cu K întreg , vor coincide cu primul punct, deoarece adăugarea sau scăderea unghiurilor se întoarce din același unghi, rezultatul nu Schimbare. În general, toate punctele identificate prin coordonate ( r , θ + K × 360 ° ) corespund aceluiași punct trasat în planul polar.
Aceasta ilustrează un aspect important al sistemului de coordonate polare, care nu este prezent în sistemul de coordonate carteziene : fiecare punct unic poate fi exprimat cu un număr infinit de coordonate diferite, fiecare dintre ele fiind defazat față de celelalte printr-un număr întreg numărul de revoluții.
Coordonatele arbitrare (0, θ) sunt folosite în mod convențional pentru a reprezenta polul, fără un interes special pentru valoarea lui θ, de fapt fiecare punct 0 îndepărtat de pol coincide cu polul indiferent de unghiul său.
În notația polară, unghiurile sunt de obicei definite în grade sau radiani , folosind convenția că 2π rad = 360 °. Aplicațiile de navigație utilizează în mare parte grade, în timp ce aplicațiile fizice (în special în mecanica rotațională) și aproape toată literatura matematică despre calcul utilizează măsurători în radiani .
Conversia de la coordonatele polare la cele carteziene

Cele două coordonate polare Și poate fi convertit în coordonate carteziene Și folosind formulele funcțiilor trigonometrice sinus și cosinus :





în timp ce cele două coordonate carteziene Și poate fi convertit în coordonate polare aplicând teorema lui Pitagora :
- .

Pentru a determina în schimb coordonata unghiulară , trebuie luate în considerare următoarele două cazuri.
- De sine , asa de poate lua orice valoare reală .
- De sine , apoi pentru a obține o reprezentare unică a , trebuie să vă limitați la un singur domeniu de măsurare . Alegerile convenționale din această gamă sunt de obicei sau . Pentru a obține valoarea în interval , pot fi utilizate următoarele formule (arctan este funcția inversă a funcției trigonometrice tangente ):




![{\ displaystyle (- \ pi, \ pi]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7fbb1843079a9df3d3bbcce3249bb2599790de9c)

A obtine în interval , se folosesc în schimb următoarele:

O metodă alternativă de derivare în ceea ce privește Și este următorul. Folosind o identitate trigonometrică

asa de

Avantajul acestei abordări este că această formulă unică este valabilă pentru în ansamblu .

Multe programe software (inclusiv Microsoft Excel) și limbaje de programare (inclusiv Java) au funcția atan2 pentru a comuta între coordonatele carteziene și cele polare.
Ecuații polare
Ecuația care definește o curbă algebrică exprimată în coordonate polare este cunoscută sub numele de ecuație polară . În multe cazuri, această ecuație poate fi exprimată pur și simplu prin definire în funcție de . Curba rezultată constă atunci din punctele funcției și poate fi considerat graficul funcției polare a .

Din ecuația funcției polare a pot fi deduse diferite forme de simetrie . De sine , curba va fi simetrică față de axa orizontală, în timp ce dacă va fi simetric față de cel vertical și dacă , va constitui o simetrie de rotație a în sens invers acelor de ceasornic.




Datorită naturii circulare a sistemului de coordonate polare, multe curbe pot fi descrise printr-o ecuație polară destul de simplă, în timp ce expresia lor carteziană ar fi mai complicată. Printre cele mai cunoscute curbe ale acestei specii se numără rhodonea , spirala lui Arhimede , lemniscatul , limaçonul și cardioidul .
Circumferinţă

Ecuația generală a cercului cu centrul la ( 0 , φ) și raza Și


Această formulă poate fi simplificată în diferite moduri, pentru a se potrivi unor cazuri mai specifice, cum ar fi ecuația

pentru un cerc cu centrul în pol și raza .
Drept
Radiale Liniile (trecere pol) sunt reprezentate prin ecuația

unde φ este unghiul format de linia dreaptă; adică φ = arctan unde este este panta liniei în sistemul de coordonate cartezian . Linia neradială care traversează linia radială θ = φ perpendiculară pe punctul ( 0 , φ) are ecuație


Rodonea
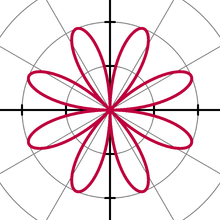
O rhodonea este o celebră curbă matematică care arată ca o floare cu petale și care poate fi exprimată pur și simplu printr-o ecuație polară, dată de

sau

Loc ca întreg , ecuația va produce cu ciudat un rodon de tip , cu chiar de tip . De sine în schimb este un număr irațional , curba va forma un disc. Rețineți că aceste ecuații nu definesc numărul de petale de trandafir; variabila reprezintă doar lungimea petalelor.


Spirala lui Arhimede

Spirala lui Arhimede este o celebră spirală descoperită de Arhimede și care poate fi exprimată pur și simplu printr-o ecuație polară, de forma

Prin schimbarea parametrului , spirala se va roti în timp ce controlează distanța dintre brațe, care pentru o spirală dată este întotdeauna constantă. Spirala lui Arhimede are două brațe, una pentru θ> 0 și cealaltă pentru θ <0 și ambele se unesc în pol. Luând imaginea în oglindă a unui braț de-a lungul liniei de 90 ° / 270 °, cele două brațe se suprapun. Această curbă este, de asemenea, remarcabilă pentru că este una dintre primele curbe, după secțiuni conice , care trebuie descrisă într-un tratat matematic și pentru că este primul exemplu de curbă care este mai bine reprezentată de coordonatele polare decât cartezienii.

Secțiuni conice

O secțiune conică cu o focalizare pe pol și cealaltă care coincide cu un alt punct al axei la 0 ° (astfel încât axa principală a conicii să poată sta pe axa polară) este dată de ecuație

unde e este excentricitatea curbei e este perpendiculară pe axa semi-majoră a curbei. Dacă e > 1, această ecuație definește o hiperbolă , dacă e = 1, definește o parabolă și dacă e <1, definește o elipsă . Cazul special în care e = 0 reduce elipsa la un cerc cu o rază .

Numere complexe

Fiecare număr complex poate fi reprezentat ca un punct pe planul complex și, prin urmare, poate fi exprimat fie în coordonate carteziene (numite formă dreptunghiulară ), fie în coordonatele polare ale punctului (numite formă polară ). Numărul complex este reprezentat sub formă dreptunghiulară ca


in care este unitatea imaginară sau poate fi scrisă alternativ în formă polară ca


și de aici cum

in care este numărul lui Napier . Cele două formule sunt echivalente cu cele stabilite de formula lui Euler . Pentru a converti forma dreptunghiulară în polar și invers, se pot aplica formulele de mai sus.

Pentru multiplicarea , divizarea și operațiile exponențiale ale numerelor complexe, este în general mai ușor să operați cu numere complexe exprimate în formă polară, mai degrabă decât în formă dreptunghiulară. De fapt, pentru regulile exponențiale:
- Multiplicare:

- Divizia:

- Exponențială ( formula De Moivre ):

Traducere în coordonate polare
Prin exploatarea formei polare a unui număr complex este posibil să se ajungă la formula de traducere în coordonate polare. Am luat două puncte în coordonatele polare Și , exprimate cu formula lui Euler sunt



Dacă luăm în considerare punctul ca punct tradus e ca origine a noii axe, fie punctul nu este tradus, atunci traducerea este




Modulul numărului complex este un număr real pozitiv definit ca


Având în vedere acum o ecuație polară

Pentru a aplica o traducere funcției putem înlocui cu formula de mai sus, apoi


Și ecuația devine

De sine este o funcție constantă, atunci traducerea reprezintă un cerc ca ecuație


reprezintă un cerc cu centrul originii și raza valorii constantei. Rețineți că, în termeni geometrici, translația unui punct este distanța dintre punct și originea noii axe, așa cum este clar vizibil din formula însăși. Pentru a converti curba tradusă de la coordonate polare la coordonate carteziene trebuie să luăm punctul de pe curbă în coordonate polare și să o transformăm în coordonate carteziene, obținem pur și simplu același sistem văzut mai sus, de fapt este suficient să luăm punctul care este componentă a punctului .
Calcul infinitesimal
Calculul poate fi aplicat ecuațiilor exprimate în coordonate polare. Coordonata unghiulară , în această secțiune, alegerea convențională în calcul este exprimată în radiani .
Calcul diferențial
Există următoarele formule:


Sau inversul:


Pentru a găsi panta carteziană a tangentei la curba polară la un moment dat, curba este mai întâi exprimată cu un sistem de ecuații parametrice .



Derivarea ambelor ecuații cu privire la


Făcând raportul dintre a doua și prima ecuație, obținem panta liniei tangente la curbă la punctul ( θ , r (θ)):

Calcul integral: zonă subtendută

Dacă R reprezintă regiunea spațiului închisă de curba r (θ) și de liniile θ = a și θ = b , în care 0 < b - a <2π, atunci aria lui R este exprimată prin


Putem ajunge la acest rezultat după cum urmează: În primul rând, intervalul [ a , b ] este împărțit în n sub-intervale, unde n este un întreg pozitiv arbitrar. Numită Δθ amplitudinea fiecărui subinterval, există relația că Δθ este egală cu b - a (lățimea totală a intervalului), împărțit la n , numărul subintervalelor. Pentru fiecare subinterval, i = 1, 2,…, n , θ i se numește punctul său mediu și construim un sector circular cu centrul în pol, raza r (θ i ) și unghiul Δθ. Prin urmare, suprafața fiecărui sector construit este egală cu . Prin urmare, suprafața totală a tuturor sectoarelor va fi egală cu


Când crește numărul de subgrupuri , aproximarea zonei continuă să se îmbunătățească. La limită , însă , suma devine suma Riemann pentru integralul anterior.


Calcul integral: lungimea liniei
Lungimea liniei exprimată de o funcție polară se obține prin integrarea segmentelor infinitesimale de-a lungul curbei r ( θ ) în sine. Folosim L pentru a indica lungimea liniei de la punctul de pornire A până la punctul de încheiere B , unde aceste puncte corespund: = a , = b . Lungimea L a liniei este dată de următoarea integrală:


- =
![L = \ int _ {a} ^ {b} {\ sqrt {\ left [r (\ theta) \ right] ^ {2} + \ left [{{dr (\ theta)} \ over {d \ theta} } \ right] ^ {2}}} d \ theta](https://wikimedia.org/api/rest_v1/media/math/render/svg/fe4238d39d4941e495ae8f630d7f8eb575a6a600)
![\ int _ {{\ theta _ {A}}} ^ {{\ theta _ {B}}} {\ sqrt {\ left [r (\ theta) \ right] ^ {2} + \ left [{{dr (\ theta)} \ over {d \ theta}} \ right] ^ {2}}} d \ theta](https://wikimedia.org/api/rest_v1/media/math/render/svg/5344a9f96ed25b4d1ab40549bb26bea09cecb5c6)
Generalizare
Folosind coordonatele carteziene , un element infinitesimal de zonă poate fi calculat ca . Regula de substituție pentru integrale multiple stabilește că, trecând la alte coordonate, trebuie să luăm în considerare valoarea absolută a determinantului matricei iacobiene :


Prin urmare, un element de zonă în coordonate polare poate fi scris ca

Acum, o funcție dată în coordonate polare poate fi integrată după cum urmează:

Aici este aceeași regiune obținută mai sus și corespunde zonei închise de curbă și din rânduri Și .



Formula de calcul è stata ricavata assumendo identicamente uguale a . Un'applicazione sorprendente di questo risultato riguarda la possibilità di calcolare l' integrale di Gauss


Calcolo vettoriale
Le coordinate polari si possono applicare anche al calcolo vettoriale e, in particolare, allo studio della cinematica dei moti piani. Sia la posizione del vettore


espresso in un sistema di coordinate cartesiane di versori di base e , Il modulo e l'angolo polare dipendono dal tempo e descrivono il movimento di un corpo nel piano.



Siano il vettore unità ( versore ) nella direzione di e il versore dell'angolo di .


Le derivate prima e seconda del vettore posizione

sono, rispettivamente, il vettore velocità

ed il vettore accelerazione
![{\mathbf {a}}(t)={\frac {d^{2}{\mathbf {r}}}{dt^{2}}}=\left[{\frac {d^{2}r}{dt^{2}}}-r(t)\left({\frac {d\theta }{dt}}\right)^{2}\right]\,{\hat {{\mathbf {r}}}}(t)+\left[r(t){\frac {d^{2}\theta }{dt^{2}}}+2{\frac {dr}{dt}}{\frac {d\theta }{dt}}\right]\,{\hat {{\boldsymbol \theta }}}(t).](https://wikimedia.org/api/rest_v1/media/math/render/svg/c35a9740d75a5797a524388d485033f7f6aec3f2)
del moto. Si ricorda che le derivate dei versori sono:


In tre dimensioni
Il sistema di coordinate polari si può estendere anche alle tre dimensioni, con due differenti sistemi di coordinate, quelle cilindriche e quelle sferiche, delle quali entrambe richiedono coordinate polari planari o bidimensionali come base. In sintesi, il sistema di coordinate cilindriche estende le coordinate polari aggiungendo un'altra coordinata della distanza, mentre le coordinate sferiche aggiungono un'altra coordinata angolare.
Coordinate cilindriche

Il sistema di coordinate cilindriche è un sistema di coordinate che estende il sistema bidimensionale polare aggiungendo una terza coordinata, che misura l'altezza di un punto dal piano base, in modo simile a quello in cui si introduce la terza dimensione nel piano cartesiano . La terza coordinata è spesso chiamata , e l'intera terna è quindi .


Le tre coordinate cilindriche possono essere convertite in coordinate cartesiane con le formule

Coordinate sferiche

Le coordinate polari possono essere estese in tre dimensioni anche utilizzando le coordinate , in cui è la distanza dal polo, è l'angolo formato con l'asse e è l'angolo formato dalla proiezione sul piano , con l'asse . Questo sistema di coordinate, chiamato sistema di coordinate sferiche , è simile al sistema della latitudine e longitudine utilizzato per la Terra , con la latitudine δ che è il complementare di , se è l'asse di rotazione terrestre, determinato dalla relazione δ = 90° − θ, e la longitudine est l = φ (se φ compreso fra 0° e 180°) ovvero la longitudine ovest l = - φ (se φ è compreso fra -180° e 0°), se il semipiano con contiene il meridiano di Greenwich.







Le tre coordinate cartesiane di un punto si ottengono dalle tre coordinate sferiche di quel punto con le formule:



Applicazioni
Le coordinate polari sono bidimensionali, e pertanto possono essere utilizzate soltanto ove le posizioni dei punti giacciano su un singolo piano bidimensionale. Il loro utilizzo è appropriato in ogni contesto in cui il fenomeno considerato sia legato alla direzione e alla distanza da un certo punto; gli esempi sopra mostrati mostrano come elementari equazioni polari siano sufficienti a definire curve – come la spirale di Archimede – la cui equazione in coordinate cartesiane sarebbe molto più intricata. Inoltre, molti sistemi fisici – come quelli riguardanti i corpi che si muovono intorno a un punto centrale e con fenomeni originanti da un punto centrale – possono essere trattati in modo più semplice e più intuitivo utilizzando le coordinate polari. La motivazione iniziale per l'introduzione del sistema polare fu lo studio del moto circolare e del moto orbitale .
Le coordinate polari sono spesso utilizzate nella navigazione , quando la destinazione o la direzione del viaggio possono essere forniti attraverso un angolo e una distanza dal luogo di arrivo. Ad esempio, gli aeroplani utilizzano una versione leggermente modificata delle coordinate polari per la navigazione. In questo sistema, gli angoli sono considerati in senso orario. L'angolo a 360° (0°) corrisponde al nord magnetico , mentre gli angoli a 90°, 180° e 270° corrispondono all'est magnetico, sud magnetico e ovest magnetico rispettivamente. Pertanto, un aeroplano che viaggia a 5 miglia nautiche a est starà viaggiando a 5 unità verso l'angolo di 90°.
Modelli
I sistemi che mostrano una simmetria radiale sono l'ambiente ideale per l'applicazione delle coordinate polari, con il punto centrale che agisce da polo. Sistemi con una forza centrale sono anche potenziali candidati all'utilizzo delle coordinate polari: questi sistemi includono i campi gravitazionali , che obbediscono alla legge dell'inverso del quadrato , come anche i sistemi con una sorgente puntiforme, come le radio antenne .
Bibliografia
- Howard Anton, Calculus . Anton Textbooks, 2002. ISBN 0-471-38157-8
- Ross Finney, Calculus: Graphical, Numerical, Algebraic . Addison-Wesley Publishing, 1994, ISBN 0-201-55478-X
Voci correlate
Altri progetti
-
 Wikimedia Commons contiene immagini o altri file su sistema di coordinate polari
Wikimedia Commons contiene immagini o altri file su sistema di coordinate polari
Collegamenti esterni
- Coordinate geografiche polari ( PDF ), su physics.oregonstate.edu .
- Applicazione per la conversione delle coordinate da cartesiane a polari [ collegamento interrotto ] , su sourceforge.net .
| Controllo di autorità | GND ( DE ) 4323692-3 |
|---|