Sonar
Sonar (un termen care provine din acronimul expresiei englezești so und na vigation and r anging ) este o tehnică care utilizează propagarea sunetului sub apă pentru navigație, comunicare sau pentru a detecta prezența și poziția navelor sau a submarinelor . Se face distincția între sonarele active și pasive .
Propagarea sunetului a fost folosită și în aer în trecut, înainte de introducerea radarului și este încă utilizată pentru navigația roboților, în timp ce SODAR (un sonar aerian de jos în sus) își găsește aplicația în inspecțiile atmosferice. Termenul sonar indică, de asemenea, instrumentul folosit pentru a genera și primi semnale acustice. Banda de frecvență utilizată de sistemele sonare variază de la infrasunete la ultrasunete . Studiul propagării sunetului sub apă este cunoscut sub numele de acustică subacvatică sau hidroacustică .
Istorie
A fost inventat de Paul Langevin în 1917 [1] . Marinei britanice și germane au considerat submarinul , în perioada dintre cele două războaie, o armă învechită mai ales după apariția dispozitivului de detectare acustică numit „ASDIC” ( Comitetul de investigare a detectării anti-submarine ), cunoscut astăzi sub numele de sonar [2] ; britanicii au fost primii care au dezvoltat o tehnologie care a permis detectarea unui obiect prin sunet [3] și descoperirea propagării undelor sonore în apă nu a avut loc în timpul primului război mondial și, pentru detectarea submarinelor, a unor hidrofoane simple ) [2] . Sistemul ASDIC era compus dintr-un traductor, conținut într-o cupolă sub navă, care trimitea unde acustice care se întorceau la origine dacă se reflectau dintr-un obiect scufundat, plasat la o distanță maximă de aproximativ 2700 m. Domul ar putea fi fixat, ca în aparatul de tip 123 instalat pe corvetele din clasa Flower sau retractabil ca în unele nave [4] , cum ar fi distrugătorul HMS Campbeltown , echipat cu un ASDIC tip 124 [4] . Direcția și distanța obiectului au fost derivate din ecou, dar semnalele false ar putea fi generate de diferențele de temperatură a apei, curenții, școlile de pește ( stratul reflectorizant profund ) și, în plus, ASDIC a fost eficient doar la viteze mai mici de 15 noduri ( 28 km / h), deoarece la viteze mai mari zgomotul navei ar fi acoperit ecourile; o altă limitare a fost reprezentată de traversarea traductorului, doar pe orizontală, cu consecința că contactul a fost pierdut atunci când ținta a trecut sub nava vânătorului [5] .
Procedura de utilizare a constat în utilizarea ASDIC într-un arc de la o parte la alta a navei, oprirea traductorului la distanțe de câteva grade pentru a trimite un semnal și căutări în grupuri de nave implicate alinierea navelor la distanța dintre una mile și mile mile și jumătate; dacă s-ar detecta un ecou identificabil ca submarin, nava ar fi arătat către țintă și s-ar fi apropiat cu viteză medie până când se afla la o distanță mai mică de 910 m și, între timp, direcția și distanță, pentru a obține cursul și viteza submarinului. Atacul a fost efectuat trecând în fața submarinului pentru a descărca bombele de adâncime, aruncându-le la intervale de timp, urmând un model care a prins submarinul. Pentru a fi eficiente, însă, bombele au trebuit să explodeze la o distanță mai mică de 6 metri, iar primele sisteme ASDIC nu au putut determina adâncimea cu o precizie suficientă; din acest motiv, schema de lansare a bombelor a inclus și explozia bombelor la diferite adâncimi [6] .
Sistemul ASDIC suferea de unele limitări: bărcile U puteau coborî mai adânc decât cele britanice și americane, dincolo de 700 ft, egal cu 210 m, dincolo de capacitățile bombelor de adâncime britanice, care ar putea ajunge la 350 ft, aproximativ 100 m, iar explozia unei bombe de adâncime a tulburat apa, făcând foarte dificilă reabilitarea contactului inamicului în cazul în care primul atac a eșuat; de asemenea, trebuie remarcat faptul că sistemul nu s-a bucurat de încrederea marinei aliate și Marina Regală a început războiul cu un număr insuficient de distrugătoare și ofițeri cu experiență în armele antisubmarine [7] . Situația în comanda de coastă a Royal Air Force a fost și mai gravă, deoarece avioanele de recunoaștere nu aveau autonomie adecvată pentru patrulare și consecințele pe care descoperirea radarului le-ar avea în războiul pe mare nu fuseseră încă evaluate [ 7] .
Alte marine au început, de asemenea, să experimenteze cu primele modele de ASDIC atunci când unele unități, corvete, dar și bărci de pescuit armate [8] , erau echipate cu personal non-englez sau echipamentele erau instalate pe nave aliate, precum distrugătorul olandez Isaac Sweers [9] ] .
Operațiune
Sonarul este singurul aparat pe care un submarin îl poate folosi, când este scufundat sub adâncimea periscopului, pentru a detecta obstacolele care îl înconjoară, cu alte cuvinte pentru a identifica navele de suprafață, submarinele, animalele marine sau chiar duritatea sau minele de pe fundul mării. Pe un submarin găsim două tipuri de sonar , pasiv și activ.
Sonar pasiv
Sonarul pasiv, numit componenta hidrofonică, constă din unul sau mai mulți senzori, care preiau sunetele transmise de nave și permit localizarea direcției de origine și identificarea sursei pe baza caracteristicilor sunetului detectat.
Sonarul pasiv constă dintr-o serie de traductoare (bază de hidrofon) și este utilizat pentru a detecta poziția țintei.
În condiții optime (adică o mare calmă), un sonar pasiv modern poate detecta poziția țintei de la multe mile marine, permițând astfel submarinului să descopere potențiale amenințări înainte de a intra în raza senzorilor lor.
Cel mai bun avantaj al acestei soluții este tăcerea, împreună cu posibilitatea de a descoperi caracteristicile sursei de emisie de zgomot.
De asemenea, este posibil, datorită trigonometriei și având cel puțin trei senzori dispuși pe lungimea bărcii (numit Contor de Distanță Pasivă), pentru a obține distanța până la sursă cu o aproximare suficientă.
Sonar activ
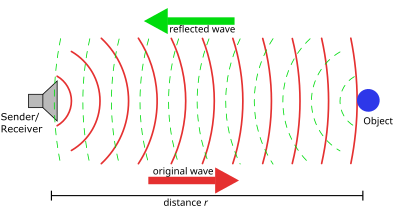
Sonarul activ funcționează conform principiului radar și permite localizarea corpurilor scufundate prin detectarea ecourilor legate de impulsurile de sunet sau ultrasunete emise prin intermediul unei baze acustice cilindrice construite cu un set de elemente de transducție piezoelectrice de tip Tompilz.
Baza acustică cilindrică emite un semnal impulsiv de energie acustică ridicată ( ping ) de nivel mai mare decât (deciBel / micro Pascal); obiectele din zonă reflectă sunetul și unda reflectată (ecoul) este colectată de senzorii submarinului.

Timpul scurs între momentul în care este emis semnalul acustic și momentul în care unda reflectată ajunge la emițător, oferă distanța până la țintă cu o precizie extremă.
Avantajul sonarului activ este de a oferi informații imediate despre distanța și viteza țintei.
Dezavantajul este că transmisia poate fi primită de submarinele inamice și / sau nave și utilizată pentru a localiza submarinul care transmite.
În mod similar cu radarul, sonarul activ oferă informații cu privire la poziția bărcii țintă, care va fi mai precisă cu cât puterea acustică emisă va fi mai importantă, dimensiunile bazei acustice a transmisiei vor fi congruente, dimensiunile țintei (țintă rezistența) și aspectul său (înclinarea axei longitudinale a bărcii față de direcția de origine a impulsului acustic) vor fi favorabile.
Din cauza acestui risc, este utilizat doar ca ultimă soluție pentru a determina distanța exactă și locația unei ținte.
În prezent, este un echipament de neînlocuit pentru orice marină. Închiderea lor ar cauza sfârșitul monitorizării oricărei activități submarine, ar permite oricui să intre și să iasă din apele teritoriale ale fiecărei țări și ar expune fiecare unitate navală la sabotarea de către scafandri (ca în vremurile celui de-al doilea război mondial).
Notă
- ^ Cronologia secolului al XX-lea, mari manuale Newton
- ^ a b Boyne 1997 , p. 168
- ^ (EN) Fighting the U-boats - Weapons and Technologies - asdic / Sonar- of Uboat.net on uboat.net. Adus la 4 ianuarie 2010 .
- ^ A b (EN) asdic , pe netherlandsnavy.nl. Adus la 3 ianuarie 2010 .
- ^ (EN) Richard Harding, Royal Navy, 1930-2000: Inovație și apărare , a books.google.it. Adus la 3 ianuarie 2010 .
- ^ a b Boyne 1997 , p. 169
- ^ (EN) Anatomia unui trawler asdic [ link rupt ] , la bbc.co.uk. Adus la 6 ianuarie 2010 .
- ^ (EN) HNMS Isaac Sweers (G 83) , pe uboat.net. Adus la 6 ianuarie 2010 .
Elemente conexe
Alte proiecte
-
 Wikiversitatea conține resurse pe sonar
Wikiversitatea conține resurse pe sonar -
 Wikimedia Commons conține imagini sau alte fișiere pe sonar
Wikimedia Commons conține imagini sau alte fișiere pe sonar
linkuri externe
- ( EN ) Sonar , în Encyclopedia Britannica , Encyclopædia Britannica, Inc.
- ( RO ) Sonar Tutorial pentru roboți , pe societyofrobots.com .
- ( EN ) Sonar de profilare: inspectarea țevilor submersite în service , pe redzone.com . Adus la 1 septembrie 2008 (arhivat din original la 5 iulie 2008) .
- ( EN ) Sonarele și mediul marin de către unitatea norvegiană de cercetare în domeniul apărării (FFI)
- ( EN ) Single Beam Sonars , pe csc.noaa.gov . Adus la 1 septembrie 2008 (arhivat din original la 3 iunie 2010) .
- ( EN ) Sonar "Primer" , pe research.usm.maine.edu . Adus la 1 septembrie 2008 (arhivat din original la 2 ianuarie 2008) .
- Situl submarin din clasa Toti , pe delfinid Acciaio.it .
- Site gratuit pentru funcționarea sonarului , pe sonar-info.info .
| Controlul autorității | Tezaur BNCF 40570 · LCCN (EN) sh85124813 · GND (DE) 4181785-0 · BNF (FR) cb119800800 (dată) · BNE (ES) XX534627 (dată) · NDL (EN, JA) 00.571.412 |
|---|