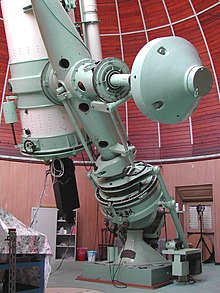
Telescopul Zeiss al lui Merate
| Telescopul Zeiss al lui Merate | |
|---|---|
 | |
| Observator | Observatorul Astronomic al Meratului |
| Corp | INAF |
| Stat | |
| Locație | Merate |
| Coordonatele | 45 ° 42'21,96 "N 9 ° 25'41,99" E / 45,7061 ° N 9,42833 ° E |
| Incorporat | 1926 |
| Caracteristici tehnice | |
| Tip | Reflector |
| Diametrul primar | 1,02 m |
| Diametrul secundar | 44 cm |
| Diametrul terțiar | 28 cm |
| Distanța focală | 5 m (Newton) 16,25 m (Cassegrain) |
| Cadru | Engleză ecuatorială |
Telescopul Zeiss al observatorului astronomic Merate , sediul operațional al observatorului astronomic Brera , este un telescop reflectorizant cu o deschidere de un metru , construit în 1926 de compania Zeiss din Jena . La momentul instalării, acesta era cel mai mare telescop din Italia și unul dintre cele mai mari din Europa.
Începând din toamna anului 2003, a fost utilizat pentru un program continuu pe termen lung de observare a stelelor duble vizuale înguste, cu tehnica interferometriei speckle .
Istorie


Observatorul Astronomic Merate s-a născut la începutul anilor '20 ca un observator detașat al istoricului observator milanez din Brera . Primul telescop instalat în noul sediu a fost reflectorul unui metru de deschidere pe care de mulți ani directorul Emilio Bianchi a încercat să-l procure pentru astronomia italiană pentru a-i permite să concureze la nivel internațional în domeniul observației și în cercetarea paralaxelor spectroscopice , fără succes.datorită resurselor financiare reduse disponibile și costului prohibitiv al acestui instrument.
Deja la începutul anului 1922 a fost interesat Zeiss pentru estimarea unui rafinat de un metru dublu focalizare telescop, Newton și Cassegrain, sprijinindu -se pe un englez ecuatorială montură cu două suporturi, dar costul a depășit cu mult disponibilitatea pecuniară.. Cu toate acestea, în luna decembrie a aceluiași an, grație mijlocirii prim-ministrului Mussolini și a senatorului Luigi Mangiagalli, telescopul a fost repartizat în Italia pentru reparații de daune de război. Neașteptatul epilog a deschis ușile sosirii instrumentului la observatorul din Merate, fără nicio cheltuială din partea italiană.
A trebuit să fie livrată până în 1924, dar construcția la Zeiss a continuat încet și o vizită a lui Bianchi însuși la fabrica Jena în aprilie 1925 a evidențiat întârzierea lucrării în comparație cu vremurile așteptate. Telescopul a ajuns la Merate la 21 iulie 1926 în treizeci și opt de lăzi mari din lemn. Editarea a început pe 26, sub conducerea tehnică a lui Paul Rudolph, șeful tehnic al Zeiss, și cu supravegherea lui Emilio Bianchi.
Pentru a proteja ceea ce astăzi am numi secret industrial , Zeiss, în persoana lui Rudolph, a cerut absența în cupolă în timpul adunării personalului italian care avea cunoștințe de mecanică. Muncitorii angajați în trudă au fost apoi recrutați de la fermierii din district, în timp ce tehnicienii au fost trimiși chiar de Zeiss. În ciuda acestei interdicții, regizorul Bianchi s-a infiltrat într-o figură de încredere printre muncitori, un tâmplar de pe șantierul Brera, dar un om de mare ingeniozitate și acuitate mentală. În principal datorită rapoartelor sale zilnice, detaliile tehnice ale asamblării ne sunt cunoscute astăzi. Completați imaginea celor prezenți Gino Giotti [1] care la finalul lucrării s-a ocupat de îmbunătățirile necesare pe care instrumentul le-a cerut, și Leonida Martin [2] .
Ansamblul pieselor până în acea zi a ajuns la Merate în cele treizeci și opt de cutii s-a încheiat pe 9 august. Oglinda principală, regulatorul complex de mișcare în sensul acelor de ceasornic, parte a sistemului de focalizare pentru combinația Cassegrain, tabloul electric și mecanica mișcărilor fine ale axei de declinare lipseau, care au sosit târziu în săptămânile următoare. În seara de 20 septembrie 1926, telescopul a fost întors spre cer pentru prima dată, cu un motor provizoriu pentru bronz, iar entuziasmul celor prezenți a fost mare la prima lumină . Totuși, se poate spune că întregul sistem ar fi finalizat doar pe 15 octombrie.
Galerie de imagini a operațiunilor de asamblare

Asamblarea axei ascensiunii drepte. Rețineți furculița de susținere a stâlpului sudic și, în partea superioară a stâlpului nordic, masa cu reglaje micrometrice.

Asamblarea axei de declinare. În partea dreaptă se află excelența Emilio Bianchi, directorul observatorului. În fundal, motorul și unitatea reductoare pentru rotația cupolei.

Montați suportul oglinzii secundare. Stând în centru P. Rudolph, așezat în partea dreaptă jos regizorul Emilio Bianchi.

Asamblarea culei și oglinzii principale. Rețineți suportul care ține contragreutatea, deoarece telescopul, încă fără oglindă, este oarecum dezechilibrat.




Utilizare
După finalizarea vastului catalog de paralaje spectroscopice, instrumentul a fost folosit mult timp pentru studii spectroscopice de fizică stelară . Ulterior a fost dedicat fotometriei stelelor variabile și mai târziu polarimetriei asteroizilor . În anii nouăzeci a fost lăsat la predarea serii pentru observarea oculară a principalelor obiecte cerești , cu ocazia vizitelor dese organizate pentru grupuri școlare de toate nivelurile. Din noiembrie 2003, după o întreținere îndelungată și atentă, a revenit la rolurile științei și este folosită în fiecare seară de bună vedere pentru interferometria petelor de stele duble vizuale înguste, ca parte a unui program internațional de observare.
Instrumentele focale pentru aceste studii, și anume spectrograful , fotometrul , polarimetrul și camera PISCO speckle , sunt instalate numai la focalizarea Cassegrain. Ocularele și suportul pentru plăci fotografice pot fi în schimb montate la ambele focare, totuși configurația optică Newton pentru astrofotografie pe câmp larg operată cu plăci de 6x9 și pentru observarea ocular a obiectelor extinse a fost rar utilizată.
Descriere
Instrumentul principal este de tipul focalizării duble, Newton și Cassegrain, potrivit atât pentru lucrări fotografice pe câmp larg, cât și pentru spectrografie cu distanță focală lungă, instalat pe un suport englezesc. Configurația Newton este potrivită pentru primul tip de utilizare, în timp ce Cassegrain este ideal pentru lucrul cu spectrograful ; Cassegrain este, de asemenea, potrivit pentru susținerea echipamentelor focale foarte grele, cum ar fi spectrograful, datorită simetriei mecanice a sistemului și a contragreutăților cu șurub glisant care permit menținerea tubului întotdeauna perfect echilibrată în raport cu cele trei axe: optică, ascensiune dreaptă și de declinare .
subsol
Fabricat din beton armat, este îngropat până se întemeiază pe stânca de sub pământ. Structura sa este complet decuplată de fundațiile clădirii cupolei și de podeaua camerei de observare, pentru a preveni răspândirea către instrument a oricărei vibrații induse de activitățile desfășurate în cupolă.
De la bază se ridică cei doi stâlpi care constituie suporturile telescopului. Unirea centrelor lor se află în planul meridianului local . Stâlpul sudic apare chiar deasupra nivelului etajului camerei de observare, stâlpul nordic cu forma sa caracteristică a gâtului de gâscă se ridică în schimb cu aproximativ 4 metri. Planul superior al stâlpului nordic este paralel cu axa de rotație a pământului prin construcție și are o placă metalică micrometrică robustă, care permite ajustarea azimutului fin și a înălțimii întregului suport pentru o staționare polară perfectă a telescopului.
Cadru

Este un ecuatorial de tip englezesc, în esență un telescop german cu suport dublu, de-a lungul liniei telescopului Plaskett de 1,80 metri al Observatorului astrofizic Dominion din Victoria , Canada , care l-a inspirat pe Emilio Bianchi în alegere. Printre avantaje se numără stabilitatea structurii datorită suportului dublu și posibilității de a orienta telescopul către orice zonă a bolții cerești , posibilitate neobișnuită în marile instrumente din trecut. Dezavantajele includ necesitatea de a răsturna tubul și de a-l lua din banda de meridian opusă atunci când doriți să îndreptați zonele cerului către polul ceresc , dacă este împiedicat să se deplaseze de către stâlpul nordic al suportului și inconvenientul observând postura la focul Newton.care se poate ridica la câțiva metri deasupra nivelului podelei.
Schema monturii este destul de simplă: este o cruce a cărei braț este axa dreaptă de ascensiune, numită și axa polară sau axa în sensul acelor de ceasornic, iar celălalt braț este axa de declinare. Cele două capete ale axei de ascensiune dreaptă se sprijină pe cei doi stâlpi, construiți astfel încât să fie paralel cu axa polară a pământului. Tubul telescopului atârnă la un capăt al axei de declinare, ortogonal față de axa polară în punctul său mediu; la capătul opus este fixată contragreutatea care echilibrează conducta. Cu toate acestea, implementarea Zeiss a acestei scheme simple este de o complexitate mecanică extraordinară, pentru a garanta echilibrul perfect al sistemului și ușurarea constantă a greutății care cântărește pe rulmenții axelor indiferent de poziția telescopului.
Axa ascensiunii drepte

O porțiune goală lungă, în formă de fus, începe de la gulerul de iluminare al suportului sudic și se termină cu gulerul de sprijin pentru suportul nordic. Aceasta este axa polară reală. Imediat în spatele gulerului de iluminare se află roata mare dințată care transmite mișcarea în sensul acelor de ceasornic către axă pentru urmărirea siderală controlată de regulator, care poate fi decuplată cu un ambreiaj inelar. În spatele roții se află cilindrul fix care acoperă partea terminală a axei între rulmenții de registru și o leagă de furca de sprijin sudică. În aval de cilindru se află unitatea mecanică care transmite mișcarea de rotație pentru mișcări rapide, conectată rigid la axa cu manta. , și cercuri graduate fin gravate pentru o citire precisă cu a noua în formă de arc a unghiului orar și a ascensiunii drepte. În cele din urmă, la extremă se află plăcile de cupru pe care insistă pieptenele contactelor glisante, pentru a transporta curentul electric către diferitele motoare și servomecanisme situate pe telescop fără ca vreun cablu să se răsucească vreodată din cauza mișcărilor; instrumentul se poate roti, așadar, la nesfârșit.
Numeroasele lagăre de registre care leagă mecanismele de transmitere a mișcărilor la axă și cercurile gradate sunt destul de sensibile și nu pot suporta greutatea mare a instrumentului. Problema reliefului este rezolvată cu un mecanism de iluminare ingenios, moștenit de la sistemele similare, dar mai simple, deja utilizate pe telescoapele din secolul al XVIII - lea . Imediat înaintea cilindrului care învelește partea terminală a axului, se află gulerul mare pe a cărui bandă inferioară se așează două roți mari cușcate netede, cu frecare ușoară, care încearcă să o ridice. Leagănul lor este de fapt ancorat la capătul a două bare lungi care acționează ca pârghii de ordinul întâi , pivotate spre extensiile din dreapta și din stânga ale știfturilor furcii și coborând în sub-cupolă. La capătul opus al acestor pârghii coplanare față de axă, deci în camera de bază, se află cele două contragreutăți de plumb pentru o cantitate de aproximativ 1,4 tone . Forța exercitată de pârghii pentru acțiunea contragreutăților tinde să ridice axa telescopului, ușurând componenta greutății ortogonale față de acesta și situându-se în plan vertical; componenta paralelă se descarcă în schimb pe lagărul de împingere al cilindrului căptușelii. Rulmenții de registru sunt astfel complet eliberați de forța de greutate a telescopului și pot funcționa în cele mai bune condiții.
Axa de declinare

Acesta intersectează axa dreaptă de ascensiune în punctul mijlociu al părții sale fusiforme și este cuplat mecanic cu aceasta, datorită a două flanșe opuse care se deschid pe fus și ale căror fețe sunt paralele cu acesta. Se compune din două elemente coaxiale aparent decuplate, dar în realitate interconectate, primul se numește axa goală , a doua axă solidă . Axa instrumentală de declinare este axa geometrică a primei. Axa goală poate fi gândită ca un fel de apendice a tubului telescopului, ortogonal și integral cu acesta, care alunecă în deschiderile flanșate ale axei polare și iese din banda opusă, ca și cum ar fi al doilea braț al unei cruci . Conectată la flanșa orientată spre tub se află placa mare care poartă cercul de declinare grosier gradat pe marginea exterioară, iar în interiorul acestuia cercul de argint fin gravat pentru citirea precisă a unghiului de declinare cu vernierul de sârmă; fricțiunea inelară acționează și pe această placă pentru a dezactiva alidă care transmite mișcările fine de declinare către tub. La flanșa opusă este conectat castelul care susține motorul și mecanismele de transmitere a mișcărilor rapide și care găzduiește plăcile de cupru ale contactelor glisante, similare cu cele observate în axa de ascensiune dreaptă. Roata dințată care transmite mișcarea rotativă rapidă și care găzduiește ambreiajul complex cu excentricele mobile este fixată la capătul axei goale. Axa solidă este o bară puternică și lungă, cu o formă vag cilindrică și aproximativ 20 cm în diametru, coaxială cu axa goală și înregistrată în ea de către rulmenți. Unul dintre cele două capete, din banda castelului, este filetat, iar contragreutatea mare este panificată ; cealaltă, pe de altă parte, este împărțită sub forma unei furci semicirculare care cuprinde suprafața internă a tubului telescopului și este fixată pe banda centrală de armare prin intermediul a doi pini, ortogonali atât la axa tubului, cât și la axa solidă. Aceste trei axe (ale știfturilor, ale tubului și ale declinării) sunt toate ortogonale între ele și se intersectează într-un punct care este, de asemenea, centrul de greutate al telescopului prin construcție.
Există problema analoagă a ușurării rulmenților de registru deja văzuți cu privire la axa dreaptă de ascensiune, care nu poate rezista forțelor exercitate de componentele longitudinale ale forței de greutate considerabile. Cu toate acestea, soluția este oarecum mai complexă, deoarece setul de contragreutăți de împingere posibile poate asuma orice poziție datorită mișcărilor ambelor axe ale telescopului. Axa solidă are o umflătură asemănătoare gulerului în zona sa mediană care se sprijină cu frecare ușoară pe suprafața internă a axului gol; suprafața exterioară a axului gol, în aceeași zonă mediană, este îmbrățișată de o bandă inelară care insistă asupra acesteia prin intermediul rulmenților de registru. Totul este cuprins în partea centrală a axei fusiforme a ascensiunii drepte. O tijă este conectată rigid la banda inelară care se dezvoltă din ea în jumătatea superioară a axului axului de ascensiune dreaptă până când iese deasupra suportului nordic și acolo este conectată la un arc robust care o atrage. Prin această tijă, întreaga centură inelară este apoi trasă constant spre nord, într-o direcție paralelă cu axa polară. Pe aceeași bandă, prin două ferestre circulare ale axei orare, acționează și două pârghii de ordinul întâi, formate din bare externe coplanare și paralele cu axa în sensul acelor de ceasornic și orientate spre sud, ale căror capete inferioare sunt conectate la o contragreutate inelară care îmbrățișează partea mai mic decât axa timpului și cine este suficient de confortabil pentru ao juca. Oricare ar fi poziția telescopului, contragreutatea inelară exercită o forță asupra benzii, prin intermediul pârghiilor, a căror direcție se află în plan vertical și este întotdeauna ortogonală pe axa în sensul acelor de ceasornic datorită construcției mecanice a sistemului. Rezultanta acestor două forțe, exercitată una de arc și cealaltă de contragreutatea inelară, este o forță de iluminare verticală care eliberează rulmenții de registru de toate forțele longitudinale.
Manipularea
Utilizarea pe fiecare axă a unui singur motor pentru a obține o gamă largă de viteze necesare pentru utilizarea profitabilă a telescopului, care variază de la multe grade pe secundă pentru mișcări rapide de deplasare până la câteva secunde de arc pe secundă în scopul centrării și ghidării mișcări, era dincolo de posibilitățile electromecanicii anilor douăzeci; Prin urmare, Zeiss a preferat două mecanisme de mișcare independente pentru fiecare axă, unul pentru mișcări rapide și celălalt pentru mișcări fine. Dincolo de acestea există mecanismul de mișcare în sensul acelor de ceasornic, care acționează numai pe axa de ascensiune dreaptă pentru tragerea siderală care compensează mișcarea de rotație a bolții cerești.
Buna funcționare a mecanismului dublu se obține cu decuplarea mecanică a primului de al doilea, realizată datorită a două ambreiaje pe axă, una automată cu excentricele mobile și cealaltă inelară cu control electromanual, pentru a se asigura că mișcarea primul nu se propagă niciodată.la uneltele celui de-al doilea și invers. Cuplajele electromanual sunt numite electrobrakes sau , mai simplu , deoarece frâne atunci când sunt închise se păstrează telescopul conectat la roțile dințate ale mișcărilor fine și , prin urmare , imobil dacă acestea sunt inactive. Mișcările rapide pot fi obținute fie manual, cu volanele așezate lângă punți, fie electric; mecanismul manual este decuplat de cel electric cu un ambreiaj automat suplimentar. Setul de numeroase mecanisme presupune o anumită complexitate care necesită stăpânirea completă a sistemului și delicatețea în utilizare.
Pentru a direcționa instrumentul către steaua investigată, procedăm în două etape. Cunoscut din experiență sau din catalog își coordonează poziția pe cer, telescopul este rotit spre acea zonă acționând asupra mișcărilor rapide după ce a deschis ambreiajele ambelor axe, până când apare în câmpul căutătorului sau îl citește pe cercuri gradate aproximative coordonatele. În acest moment frânele sunt strânse și se acționează mișcările fine până când este adus în centrul răscrucei căutătorului sau coordonatele exacte sunt citite pe cercurile fin gradate; plasând ochiul pe ocularul refractorului de ghidare, se fac corecțiile finale.
Mișcări rapide

În repaus sau când este mișcat de mișcări fine, telescopul este complet decuplat de mecanismele care transmit mișcările rapide, datorită ambreiajelor automate cu excentrici mobili și este în schimb conectat de obicei la cele care transmit mișcările fine. Pentru a acționa rapid, mai întâi frânele sunt deschise pentru a o decupla de la capete și apoi sunt activate motoarele sau volanele manuale. Cuplarea mișcării rapide la axe are loc treptat prin ambreiajele excentrice care realizează mecanic pornirea ușoară și progresivă.
Sistemul este , în esență , identic pentru ambele axe și utilizează trei - faza motoare, inițial 220 V , apoi convertit la 380V cu unificarea tensiunilor electrice care au avut loc după război și sa încheiat pe întreg teritoriul național numai în 1965 . Motoarele acționează pe șuruburi melcate care sunt împânzite pe roțile mari dințate conectate la axe prin ambreiajele excentrice și sunt controlate de un panou cu butoane cu patru butoane: o pereche pentru ascensiunea dreaptă și o pereche pentru declinare, în fiecare pereche. una pentru mișcare directă și una pentru mișcare inversă. Nu există întrerupătoare de limită sau alte sisteme de oprire de urgență: siguranța telescopului este lăsată la îndemâna și bunul simț al operatorului.
Mișcări fine
Mai complicate sunt mecanismele, destul de diferite pentru axa ascensiunii drepte și pentru axa declinării, care transmit instrumentului mișcările micrometrice numite mișcări fine . La ambele axe mișcarea de rotație a arborelui motorului respectiv, în curent continuu la 110V și a cărei viteză este constantă, este redusă prin intermediul unui reductor mecanic cu două trepte cu angrenare electromagnetică , controlat de panoul butonului de mișcare fină. Când este angajat raportul mai lung, se obține viteza de reglare, utilă pentru micile mișcări de centrare a obiectelor în câmpul telescopului principal; pe de altă parte, atunci când raportul scurt este activat, se obține viteza de rechemare, necesară pentru cele mai fine corecții ale inevitabilelor anomalii de urmărire în timpul conducerii în timpul expunerilor fotografice lungi sau a fotografiilor la distanță focală foarte mare.
Panoul de control are patru butoane, un comutator și un comutator. O pereche de butoane controlează motorul pentru ascensiunea dreaptă, cealaltă pereche cea pentru declinare; în fiecare pereche una activează mișcarea înainte și cealaltă mișcarea inversă. Pe de o parte, este comutatorul de viteză care controlează reductoarele mecanice, cu două poziții: devreme pentru a activa mișcările de reglare, lent pentru a activa cele de întoarcere. Pe de altă parte, există un comutator care controlează electro-magneții diferențialului pentru decuplarea rapidă a mișcării în sensul acelor de ceasornic, util atunci când doriți să suspendați urmărirea siderală fără a opri regulatorul oarecum complex.
Pe axa ascensiunii drepte
Micile mișcări micrometrice ale ascensiunii drepte trebuie într-un fel să poată suprapune mișcarea orară de tragere, care pentru utilizarea normală a telescopului este întotdeauna introdusă. Suprapunerea este posibilă datorită unui diferențial mecanic, care pentru mișcările de întoarcere adaugă sau scade viteza arborelui mișcărilor fine din cea a arborelui regulator de mișcare în sensul acelor de ceasornic, în timp ce pentru mișcările de reglare decuplează complet mișcarea în sensul acelor de ceasornic și rigid conectează arborele de mișcare fină la arborele de ieșire. Acest mecanism sofisticat permite răspunsuri instantanee la comenzile operatorului atunci când sunt necesare cele mai bune corecții, reducând în același timp uzura diferențială și zgomotul, împiedicând componentele sale să atingă viteze excesive.
Arborele de ieșire al diferențialelor de acționare, prin intermediul transmisiilor de viteze adecvate, două șuruburi melcate angajate de benzi opuse pe roata mare dințată, care este plasat imediat sub gulerul de iluminare al axei menționate mai sus despre montură.
Pe axa declinării
Mișcările fine pentru mișcările de declinare sunt transmise cu sistemul tipic de alidă . Este cuplat la axa de declinare prin intermediul fricțiunii inelare, numită și frână de declinare din motivele deja ilustrate, și la tubul telescopului prin intermediul a trei șuruburi cu piulițe diferite în cadrul cărora se rotesc șuruburile melcate. Atunci când frâna este închisă, telescopul este deci conectat rigid la axa de declinare prin intermediul alidă.
Mișcarea de rotație a arborelui care iese din angrenajul de reducere este transmisă prin intermediul unor transmisii adecvate ale angrenajelor către cele trei șuruburi melcate care sunt încorporate în șuruburile cu piuliță. Rotația lor determină mișcarea relativă a tubului față de alidă, imediată și liberă de joc datorită pașilor diferențiați care anulează pasul mort și realizează micile mișcări de reglare și reapelare.
Mișcare orară


Grupul de mecanisme pentru ascensiunea dreaptă fină și mișcarea în sensul acelor de ceasornic, constând din regulator, motorul pentru mișcările de revenire și reglare, reductorul cu două trepte și diferențialul, se află în întregime pe masa regulatorului . Aceasta este o masă robustă din metal, sprijinită pe un suport de coloană și situată pe partea laterală a stâlpului sudic, la aproximativ 50 de centimetri deasupra podelei. De la masă, arborele vertical care, prin intermediul transmisiilor cardanice, transmite mișcarea de rotație de la ieșirea diferențială la sistemul de șuruburi melcate care acționează pe coroana mare dințată a axei de ascensiune dreaptă.
Regulatorul de mișcare în sensul acelor de ceasornic este mecanismul celei mai extraordinare complexități electromecanice dintre cei care alcătuiesc acest telescop. Scopul său este multiplu: să genereze mișcarea de urmărire a stelelor pentru a compensa rotația bolții cerești, pentru a controla și regla viteza acesteia astfel încât urmărirea să fie cât mai exactă posibil, pentru a genera mișcarea pentru mișcarea gravat fin. cercul celor nouă locuri gradate, generează trenul de impulsuri pentru curentul care controlează acționarea electrică a ambreiajelor.
Se compune din trei părți cu o formă geometrică distinctă. De la baza cubului se ridică un corp cilindric de aproximativ 25 de centimetri în diametru a cărui jumătate superioară se lărgește și are deschideri mari de ferestre protejate de sticlă transparentă, prin care este posibil să se observe mecanismele de reglare a vitezei centrifuge. Jumătatea inferioară conține motorul de 110V DC, a cărui axă verticală iese în sus și se încadrează în regulatorul centrifugal. Carterul conține transmisiile mecanice necesare, ieșirea arborelui de antrenare care se angajează în diferențial și, în lateral, generatorul mecanic al curentului pulsatoriu pentru electro-frâne.
Curentul pentru funcționarea motorului poate fi reglat în tensiune prin intermediul unui rezistor reostatic de câmp instalat pe tabloul electric, pentru a compensa instabilitatea și variabilitatea tensiunii de rețea din anii 1920 și astfel să garanteze alimentarea nominală de 110V. La viteza maximă, viteza motorului este constantă și cât mai similară cu cea care, având în vedere numeroasele reduceri mecanice dintre motor și axa de ascensiune dreaptă a telescopului, corespunde unei rotații complete a axei în 23 de ore 56 minute 4 secunde, care este perioada zilei siderale . Cu toate acestea, această viteză nu se poate spune niciodată că este perfect constantă din numeroase motive, inclusiv instabilitatea reziduală a sursei de alimentare și variabilitatea fricțiunilor implicate din cauza variației temperaturii în timpul sesiunii de observare. Reglarea acestuia este realizată electromecanic de regulatorul centrifugal amplasat în partea superioară a cilindrului.
È esso un complicato meccanismo centrifugo che in sintesi può pensarsi come un piatto rotante sopra il quale gioca una sfera sospesa di ottone vincolata radialmente con una lamina a un collare lasco che abbraccia l'asse motore e che a sua volta è vincolato al piatto tramite due molle a coltello che esplicano su di esso la loro forza con un sistema di leve. Quando il piatto è in rapida rotazione questa sfera, per la forza centrifuga cui è soggetta, tende a vincere la forza delle molle e ad allontanarsi radialmente dall'asse di pochi centesimi di millimetro. Ciò è possibile poiché il collare è lasco sull'albero e ammette un certo agio radiale. L'eccessivo allontanamento, indice di un'eccessiva velocità di rotazione, provoca da parte della sfera la chiusura di un contatto elettrico che sospende l'alimentazione del motore. Quando ciò accade il motore procede per inerzia e rallenta, il piatto rallenta e ciò diminuisce la forza centrifuga che agisce sulla sfera, essa inizia a riavvicinarsi all'asse, il contatto si riapre, il motore riceve di nuovo l'alimentazione e riaccelera. In condizioni di regime il sistema giace quindi in equilibrio instabile e regola la velocità con una sorta di modulazione di larghezza d'impulso (PWM) realizzato per pura via elettromeccanica grazie alla sfera che oscillando in senso radiale apre e chiude continuamente il circuito del motore. Una manopola esterna, collocata sopra il cielo della camera cilindrica, permette di variare la tensione delle molle a coltello che vincolano il collare e consente perciò la fine taratura del complesso centrifugo per adattarlo alle mutevoli condizioni di temperatura.
Il sistema sin qui descritto abbisogna di un controllo esterno che possa rilevare gli eventuali minuscoli errori di velocità residui, per esempio per la cattiva regolazione della tensione delle molle tramite la manopola di comando o del valore della resistenza di campo per colpa dell'operatore, e compensarli con una retroazione. Tale controllo esiste e si esplica grazie a un ingegnoso meccanismo di piatti rotanti attorno al loro asse e oscillanti lungo la verticale, posto all'esterno sul cielo della camera cilindrica e controllato dal segnale elettrico inviato ogni due secondi da un orologio a pendolo di grande precisione. In estrema e alquanto semplificata sintesi il controllo opera come segue. Un asse coassiale all'asse motore e demoltiplicato rispetto ad esso emerge dalla camera cilindrica del regolatore centrifugo sopra il suo cielo e s'innesta su una torre esterna che ivi giace, costituita da una coppia d'ingranaggi su cui poggia a dolce frizione una coppia di piatti in ottone avvitati l'uno nell'altro grazie a un'elica di passo lungo; questi quattro elementi sono tutti coassiali l'uno all'altro e hanno diametri simili. Grazie a un complicato gioco basato sulle differenze di velocità dei due ingranaggi, sullo scivolamento a dolce frizione dell'uno sull'altro e dei piatti sull'ingranaggio superiore, sul nasello radiale di un piatto e su un'ancoretta laterale mossa da un elettromagnete comandato dal segnale del pendolo l'intera torre ruota di norma alla velocità dell'asse ei piatti giacciono uno poggiato sull'altro. Se la velocità di rotazione perde l'esattezza che le è caratteristica svanisce anche il sincronismo tra il nasello del piatto e l'ancoretta comandata dal pendolo, la quale blocca allora la rotazione del piatto superiore agendo sul nasello e tale piatto s'innalza poiché tende a svitarsi sulla vite a lungo passo di quello sottostante, che ruota ancora. Un opportuno sistema di naselli garantisce che quest'azione duri al più per un giro completo soltanto, onde evitare che il piatto si disimpegni dalla sua vite e il meccanismo s'inceppi. Sollevandosi, il piatto innalza una leva a forcella che gli è poggiata sopra e che scivola su un cuscinetto, la quale per mezzo di altre leve di rinvio agisce all'interno della sottostante camera del regolatore centrifugo sulla tensione delle molle a coltello la cui forza equilibra la forza centrifuga cui è soggetta la sfera.
Il sistema di controllo, quindi, funziona per la retroazione esplicata sul regolatore centrifugo da questo meccanismo correlato al pendolo e quindi assoluto rispetto al telescopio. Tutto questo, naturalmente, è in funzione del valore impostato per la resistenza reostatica di campo, della posizione della manopola che regola la tensione a riposo delle molle a coltello, della temperatura ambientale e degli attriti interni del regolatore. Da ciò si evince come il perfetto funzionamento del moto orario sia un delicato e sensibile equilibrio perseguibile dall'operatore solo con la perizia e l'esperienza.
Caratteristiche tecniche


- Apertura: 102 centimetri
- Focale in configurazione Newton: 5 metri (f/5)
- Focale in configurazione Cassegrain: 16,25 metri (f/16,2)
Specchio principale parabolico
- Diametro utile: 102 centimetri
- Focale: 5 metri
- Vetro crown della ditta Saint-Gobain, lavorazione Zeiss
- Spessore al bordo: 17 centimetri
- Spessore al centro: 15,7 centimetri
- Equazione della parabola meridiana riferita all'asse ottico:
- Equazione del cerchio meridiano osculatore con fuoco parassiale riferita all'asse ottico:


Specchio secondario piano a sezione ellittica per la configurazione Newton
- Asse minore: 31 centimetri
- Asse maggiore: 44 centimetri
- Spessore: 6 centimetri
Specchio secondario iperbolico per la configurazione Cassegrain
- Diametro: 28 centimetri
- Focale: -195 centimetri
- Spessore al centro: 4,5 centimetri
- Equazione dell'iperbole meridiana riferita all'asse ottico:
- Equazione del cerchio meridiano osculatore con fuoco parassiale riferita all'asse ottico:


Rifrattore di guida
- Diametro della lente obiettivo: 20 centimetri
- Focale: 301 centimetri (f/15)
Cercatori
- Diametro della lente obiettivo: 120 millimetri
- Focale: 960 millimetri (f/8)
- Oculare fisso: Kellner Zeiss, 60 millimetri di focale
- Ingrandimento: 16x
- Campo di vista: 2,5°
Corredo di oculari
Per il riflettore
- Huygens Zeiss: 150 mm, 80 mm, 50 mm, 25 mm e 12,5 mm
- Ortoscopici Zeiss: 7 mm e 5 mm
Per il rifrattore
- Ortoscopici Zeiss con reticolo filare in tela di ragno: 25 mm, 12 mm, 9 mm
Per il cercatore
- Kellner Zeiss con reticolo filare, 60 millimetri di focale
Note
- ^ Gino Giotti ( Firenze , 23 aprile 1896 ), laureato in Matematica alla Normale di Pisa fu assistente astronomo a Merate dal 1926 al 1928 , in seguito passò all'istituto nazionale di ottica di Arcetri e divenne direttore dei servizi ottici alle Officine Galileo di Firenze. Partecipò alquanto allo studio e alla progettazione del telescopio Galileo da 122 cm di apertura dell'Osservatorio Astronomico di Asiago, palesemente ispirato nelle forme e nell'ottica allo Zeiss di Merate. Fu socio fondatore della Società Astronomica Italiana e dell'Associazione Ottica Italiana.
- ^ Ettore Leonida Martin ( Latisana , 21 novembre 1890 - Vicenza , 9 agosto 1966 ), laureato in Matematica, assistente astronomo a Merate dal 1924 al 1927 , in seguito direttore dell'Osservatorio Astronomico di Trieste dal 1948 e professore di Astronomia nella locale università dal 1956 .
Bibliografia
- Gino Giotti, Il riflettore di 102 cm della R. Specola di Merate . Ulrico Hoepli , Milano , 1929
- Gino Cecchini, Lo spettrografo applicato al riflettore Zeiss della R. Specola di Merate . Ulrico Hoepli, Milano , 1929
- Aldo Kranjc, Un moto orario elettronico pel riflettore Zeiss di Merate . Memorie della Società Astronomica Italiana, 1956
Pubblicazioni osservative recenti
- ( EN ) Speckle observations with PISCO in Merate - I. Astrometric measurements of visual binaries in 2004 , su adsabs.harvard.edu .
- ( EN ) Speckle observations with PISCO in Merate - II. Astrometric measurements of visual binaries in 2004 , su adsabs.harvard.edu .
- ( EN ) A definitive orbit for the visual binary ADS 8630 γ Virginis, 2006 , su adsabs.harvard.edu .
- ( EN ) Speckle observations with PISCO in Merate - III. Astrometric measurements of visual binaries in 2005 and scale calibration with a grating mask , su adsabs.harvard.edu .
- ( EN ) Speckle observations with PISCO in Merate - IV. Astrometric measurements of visual binaries in 2005 , su adsabs.harvard.edu .
- ( EN ) Speckle observations with PISCO in Merate - V. Astrometric measurements of visual binaries in 2006 , su adsabs.harvard.edu .
- ( EN ) Speckle observations with PISCO in Merate - VI. Astrometric measurements of visual binaries in 2006 , su adsabs.harvard.edu .
- ( EN ) Speckle observations with PISCO in Merate - VII. Astrometric measurements of visual binaries in 2007 , su adsabs.harvard.edu .
- ( EN ) Speckle observations with PISCO in Merate - VIII. Astrometric measurements of visual binaries in 2007 and new orbits of the multiple system Zeta Aqr (accepted)
Voci correlate
- Brianza
- Merate
- Osservatorio astronomico di Brera
- Telescopio Ruths di Merate
- Ottica
- Telescopio riflettore
- Telescopio rifrattore
Altri progetti
-
 Wikimedia Commons contiene immagini o altri file su telescopio Zeiss di Merate
Wikimedia Commons contiene immagini o altri file su telescopio Zeiss di Merate
Collegamenti esterni
- ( IT , EN ) Osservatorio Astronomico di Merate , su merate.mi.astro.it . URL consultato l'11 novembre 2018 (archiviato dall' url originale il 16 ottobre 1997) .
- La nuova sede di Merate Brera.inaf.it