Geometria epipolară

Geometria epipolară este geometria viziunii stereoscopice . Descrie relațiile geometrice și constrângerile care leagă două imagini 2D ale aceleiași scene 3D captate de două camere cu poziție și orientare distincte.
Geometria epipolară
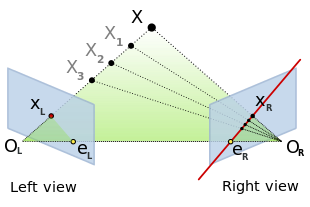
Să ne imaginăm că vrem să fotografiem un element din spațiul 3D în punctul X prin două camere centrate în O L și O R. Punctul în cauză va fi proiectat pe planul de imagine al camerei stânga în x L și respectiv x R în planul de imagine al camerei din dreapta.
Proiecția punctului X pe planul de imagine al camerelor respective are loc printr-o transformare proiectivă P L (și P R ), adică o matrice care ia în considerare poziția, orientarea și parametrii formali ai camerei respective. Relația poate fi exprimată matematic ca


Puncte epipolare
Deoarece centrele O L și O R ale fiecărei camere sunt în poziții distincte, este posibil să se proiecteze unul pe planul de imagine al celuilalt.


Colonul și L și R și sunt numite epipoles sau puncte epipolar.
Liniile epipolare
Punctul x L poate fi văzut ca intersecția liniei drepte prin O L și X , numită raza de proiecție , cu planul de imagine al camerei din stânga.
Deci, să ne imaginăm că proiectăm această linie pe planul corect al imaginii. Deoarece transformarea proiectivă este o omografie dacă raza de proiecție conectează X cu O L, atunci proiecția sa va conecta proiecțiile celor două puncte. Adică va fi linia dreaptă care trece prin x R și proiecția lui O L , adică punctul epipolar drept și R. Prin exprimarea celor două puncte în coordonate omogene, linia poate fi exprimată ca

Această linie se numește linie epipolară . Același raționament se poate face în mod analog cu razele de proiecție ale camerei potrivite.
Planul epipolar
Ca o interpretare alternativă, considerăm planul pe care se află punctele X , O L și O R. Acest plan se numește plan epipolar . Planul epipolar asociat cu un punct X interceptează planurile de imagine exact în liniile epipolare asociate cu X. Toate planurile epipolare se întâlnesc în linia dreaptă care unește cele două epipole care se numește linia de bază .
Reconstrucția scenei
Geometria epipolară joacă un rol fundamental în reconstrucția unei scene tridimensionale pornind de la o pereche de imagini stereoscopice. Reconstrucția are loc prin următorii pași:
- Având în vedere o listă de puncte corespunzătoare din cele două imagini, se calculează matricea fundamentală F , adică o matrice 3x3 de rangul doi astfel încât .
- Din matricea fundamentală, matricile reprezentând transformările proiective ale celor două camere se obțin prin relațiile:
. - Pentru fiecare pereche de puncte corespunzătoare din imagine, punctul X este estimat prin informațiile obținute din cele două matrice de proiecție.

![{\ displaystyle P_ {L} = [I | 0]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7dc229802b0c8129e634198e111c88f507ab1c10)
![{\ displaystyle P_ {R} = [[e_ {R}] \ times F | e_ {R}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a52d3e28a0aef270ebc900fe62f679b3c5910a1d)
Bibliografie
- (EN) Richard Hartley, Andrew Zisserman, Multiple View Geometry in Computer Vision, ediția a doua, Cambridge University Press, 2004, ISBN 978-0-521-54051-3 .
Alte proiecte
-
 Wikimedia Commons conține imagini sau alte fișiere despre geometria epipolară
Wikimedia Commons conține imagini sau alte fișiere despre geometria epipolară
| Controlul autorității | GND ( DE ) 7759349-2 |
|---|