Robot paralel
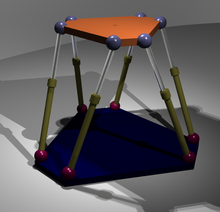
Un robot paralel este un sistem mecanic care folosește brațe mecanice controlate de computer pentru a susține o platformă sau „efector final”. Cel mai cunoscut robot paralel este format din șase pistoane (sau actuatoare ) care susțin o platformă mobilă, care este esențială pentru multe dispozitive, cum ar fi simulatoarele de zbor . Acest sistem se numește „platforma Gough-Stewart”, numită după cei doi ingineri care l-au creat și folosit pentru prima dată.
Aceste sisteme, cunoscute și sub numele de platforme Stewart generalizate, sunt roboți articulați care utilizează mecanisme similare atât pentru deplasarea robotului pe bază, cât și pentru acționarea unuia sau mai multor brațe robotice pe platformă.
Acestea sunt numite „paralele” deoarece efectorul final este conectat direct la baza sa de obicei de trei sau șase brațe independente unul de celălalt și care funcționează în paralel, adică lucrează împreună și în coordonare, dar nu neapărat aliniate paralel: aici paralel înseamnă că poziția punctului de fixare pe platforma fiecărui braț nu depinde de poziția celorlalți [1] .
Caracteristici
Un robot paralel este construit în așa fel încât să permită fiecărui braț să fie scurt, simplu, dar și rigid pentru a contracara mișcările neașteptate ale platformei. Erorile în mișcarea unui braț sunt compensate și amortizate de celelalte brațe în loc să se adune, dar fiecare braț se poate mișca doar în limita gradului său de libertate. Acest mecanism de compensare constituie rigiditatea necesară a sistemului în raport cu componentele sale. Rigiditatea robotului poate fi amplificată prin montarea unui instrument cu masă mult mai mare pe efectorul final decât cel al robotului în sine, oferind astfel robotului o mare precizie și viteză în mișcările sale. Acest lucru explică utilizarea foarte largă a acestui tip de robot în simulatoarele de zbor (care necesită viteze mari cu mase foarte mari) și lentile electrostatice sau magnetice în acceleratoarele de particule (precizie ridicată în poziționarea maselor mari).
Această rigiditate generală permite, de asemenea, o construcție simplă a sistemului: platformele Stewart cu șase brațe, de exemplu, pot utiliza articulații prismatice, dar și rulmenți sferici, care permit orice mișcare a actuatorului, contrastată doar de celelalte brațe: de aceea se numesc articulații.pasiv.
Efectorul final poate fi montat pe capetele brațelor, dar se poate așeza și pe lagăre sferice.
Un alt avantaj al roboților paraleli este că echipamentele grele pot fi montate în centrul unei platforme care poate avea chiar o singură bază: această reducere a greutății permite mișcări mai rapide, iar centralizarea masei reduce, de asemenea, momentul general de inerție, care, de exemplu, poate să fie benefic pentru un robot mobil sau de mers pe jos.

Toate aceste caracteristici oferă, prin urmare, acestor roboți capacitatea de a efectua o gamă largă de mișcări, deși viteza lor de acțiune este uneori limitată de rigiditatea lor. Unele dezavantaje ale roboților paraleli, în comparație cu roboții seriali, sunt zona lor de lucru îngustă, făcută astfel de limitările geometrice și mecanice inerente structurii lor
și neliniaritatea comportamentului lor: comanda necesară pentru a obține o mișcare rectilinie sau circulară a efectorului final depinde drastic de poziția sa în zona de lucru și nu variază regulat în timpul mișcării: din cauza acestor dificultăți acești roboți (în ciuda proprietățile lor excelente) nu sunt încă utilizate în prelucrarea de înaltă precizie.
Utilizări
- Simulatoare de zbor
- Simulatoare de conducere
- Alinierea fibrelor optice
- Micro manipulatoare montate pe efectorul final al unui robot serial mai mare, dar mai lent
- Mașini de frezat de precizie
Notă
- ^ Luca Virzì, ANALIZA PERFORMANȚEI UNUI MANIPULATOR PARALEL PENTRU PICK-AND-PLACE PRIN INDICE KINEMATICE ȘI DINAMICE ( PDF ), pe thesis.cab.unipd.it , Universitatea din Padova . Adus pe 3 mai 2016 .
- ^ DexTAR - un robot paralel educațional , pe mecademic.com (arhivat din original la 29 mai 2014) .
Alte proiecte
-
 Wikimedia Commons conține imagini sau alte fișiere despre robotul paralel
Wikimedia Commons conține imagini sau alte fișiere despre robotul paralel
| Controlul autorității | LCCN ( EN ) sh00000121 |
|---|