Structura spiritelor și oportunitățile roverilor

Spirit și Oportunitate au fost cei doi rovers folosiți în misiunea Mars Exploration Rover pentru a explora planeta Marte .
Rover-urile cu șase roți, cu energie solară, erau înalte 1,5 m , lățime 2,3 m și lungime 1,6 m , cu o greutate de 180 kg , din care 35 kg s-au datorat roților și sistemului de suspensie.
Circulaţie

Fiecare rover avea șase roți de aluminiu independente montate pe un sistem de suspensie basculant , similar cu cel al rover-ului Sojourner [1] , capabil să facă toate roțile să adere chiar și pe teren accidentat. Acest tip de suspensie vă permite să depășiți găurile mai mari decât diametrul roții (egal cu 250 mm ). Roțile au fost proiectate cu elemente flexibile capabile să absoarbă șocurile în timpul mișcării [2] și echipate cu știfturi pentru o mai bună aderență pe terenul nisipos și stâncos.
Fiecare roată avea propriul său motor, în plus cele două roți din față și cele din spate puteau direcționa, astfel încât roverul să poată fi rotit în loc, direcționat și curbat în jurul obstacolelor. Motoarele pe roți au fost proiectate de compania elvețiană Maxon motor [3] . Rover-urile au fost proiectate pentru a depăși înclinațiile de 45 de grade în orice direcție, deși pentru siguranță software-ul de protecție a fost programat pentru a evita înclinațiile mai mari de 30 de grade.
Fiecare roată putea fi rotită în loc pentru o mai bună aderență la sol, iar viteza maximă era de 50mm / s. Viteza medie a fost de 10 mm / s, deoarece software-ul de protecție a fost programat să oprească roverul la fiecare 10 secunde pentru o perioadă de 20 de secunde pentru a observa și analiza terenul.
Sisteme electronice și de alimentare


Când sunt complet iluminate, panourile solare cu triplă joncțiune ale rover-ului [4] ar putea genera aproximativ 140 W timp de patru ore pe zi. Roverul avea nevoie de aproximativ 100 W pentru a se deplasa. Sistemul energetic a inclus două baterii reîncărcabile litiu-ion de cântărire 7,15 kg fiecare pentru a alimenta rover-ul atunci când energia solară nu era suficientă.
Pentru comparație, sistemul energetic al Laboratorului științific Marte , alimentat de un generator de radioizotop proiectat de Boeing [5] , ar putea genera 125 W putere la începutul misiunii, care ar fi scăzut la 100 W după 14 ani de serviciu. Avantajul acestui tip de generator este puterea constantă independentă de ora din zi și de latitudini [6] . Energia furnizată de generatorul de radioizotopi al Mars Science Laboratory a fost 2,5 kWh pe zi, în timp ce roverul misiunii Mars Exploration a generat 0,6 kWh [6] .
Rover-urile au fost gestionate de sistemul de operare încorporat VxWorks pe un procesor IBM RAD6000 rezistent la radiații cu o frecvență de ceas de 20 MHz . Memoria DRAM a fost 128 MB cu corectarea erorilor e 3 MB de memorie EEPROM . De asemenea, fiecare rover deținea 256 MB de memorie flash .
Instrumentele roverilor trebuiau să rămână în fiecare fază a misiunii la temperaturi între −40 ° C e 40 ° C , deci în timpul nopții rover-urile au fost încălzite de opt încălzitoare radioizotopice , capabile să genereze 1 W de energie termică fiecare, împreună cu încălzitoare electrice care au fost pornite dacă este necesar. Izolarea termică a fost asigurată de un film acoperit cu aur și un strat de silicagel .
Comunicații


Rover-urile aveau o antenă cu câștig redus și o antenă cu câștig ridicat, ambele în bandă X pentru comunicații cu controlul misiunii, împreună cu o antenă UHF . Antena cu câștig redus este omnidirecțională și a fost utilizată pentru a transmite date cu viteză redusă către antenele sistemului Deep Space Network de pe TErra. Antena cu câștig ridicat era direcțională și orientabilă și putea transmite date la viteze mai mari. Rover-urile au folosit antena UHF pentru a comunica cu orbitarii prezenți, cum ar fi Mars Odyssey și Mars Global Surveyor [7] și mai târziu Mars Reconnaissance Orbiter . De fapt, orbitarii ar putea primi date de la rover-uri cu o viteză mai mare datorită distanței scurte și retransmite datele pe Pământ cu o rată mai rapidă folosind antenele lor, care sunt mai mari decât cele ale rover-urilor.
Fiecare rover avea nouă camere cu o rezoluție de 1024 x 1024 pixeli și 12 biți pe pixel, deși camerele de navigație erau limitate la 8 biți pe pixel pentru a economisi memoria și timpul de compresie. Toate imaginile au fost comprimate în format ICER înainte de a fi stocate și trimise pe Pământ. Imaginile au fost comprimate la aproximativ 0,8 - 1,1 biți / pixel.
ICER este un format de fișier de compresie a imaginilor bazat pe wavelet conceput special pentru misiuni spațiale. Produce atât compresii fără pierderi, cât și compresii cu pierderi și include un sistem de control al erorilor care limitează pierderea de date în timpul transmisiei. Este considerat un format superior formatului JPEG cu pierderi și formatului fără pierderi cu algoritmul Rice utilizat în misiunea Mars Pathfinder .
Instrumentare științifică
Instrumentele montate pe ansamblul Pancam Mas (PMA) au fost:
- Camere panoramice Cancam : două camere cu filtre colorate pentru a surprinde structura solului
- Camere de navigație Navcam ” : două camere cu câmp vizual mai larg, dar rezoluție mai mică și monocromatică pentru navigație și conducerea roverilor
- Spectrometrul cu emisii termice miniaturale ( Mini-TES )
Patru camere monocrome de evitare a obstacolelor ( Hazcam ) au fost instalate pe corpul rover-urilor , două în față și două în spate.
Dispozitivul de implementare a instrumentului ( IDD ), numit și braț robotizat, conținea următoarele instrumente:
- spectrometrul Mössbauer numit MIMOS II și dezvoltat la Universitatea din Mainz , a fost folosit pentru analiza mineralogică a rocilor și solurilor care conțin fier [8] [9] .
- Spectrometrul cu raze X cu particule alfa , dezvoltat de Institutul de chimie Max Planck , a fost utilizat pentru analiza elementelor prezente în roci și sol [10] .
- magneți, pentru a colecta particule magnetizate de praf, dezvoltate de Institutul Niels Bohr din Copenhaga și analizate de spectrometrul Mossbauser și spectrometrul cu raze X pentru a măsura raportul dintre particulele magnetice și nemagnetice și compoziția mineralelor magnetice din praful atmosferic și roci care au fost pulverizate de Rock Abrasion Tool .
- microscopul, capabil să preia imagini de înaltă rezoluție ale solului, dezvoltat de Programul de cercetare astrogeologică al Studiului Geologic al Statelor Unite .
- Instrumentul de abraziune a rocilor , dezvoltat de Honeybee Robotics pentru excavarea rocilor și atingerea mineralelor din interiorul acestora pentru a fi analizate cu alte instrumente.
PanCam

PanCams erau două camere foto echipate cu filtre și capabile să înregistreze diferite lungimi de undă ale luminii. Au fost instalate pe ansamblul PanCam Mast .
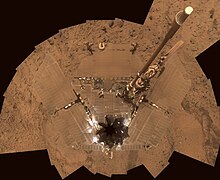
Rezoluția unghiulară a fost de 300 microradieni, de trei ori mai bună decât ochiul uman [11] și 14 benzi spectrale. Perechea de camere ar putea genera imagini stereoscopice și panoramice necomprimate mai mari de 10 Gbit [11] . La sosirea pe planeta roșie, Spirit a transmis imagini cu rezoluție mai mare a suprafeței altei planete.
Distanța focală a fost 44 mm cu un câmp vizual de 16 ° x 16 ° [12] . Cele două camere erau la o distanță de 30 cm.
Senzorul a fost un tip CCD de transfer de 1024 x 2048 pixeli, astfel încât jumătate din senzor a fost iluminată, iar cealaltă jumătate a fost protejată de lumină. Acesta din urmă a fost utilizat pentru stocarea și citirea valorilor fotosensorului [12] .
Valorile fotosenzorului au fost transformate într-o imagine digitală pe 12 biți, înainte de a fi procesate digital. Partea de calcul a PanCam a fost gestionată de un FPGA [12] .
Filtrele au fost instalate pe două roți de filtrare diferite mișcate de un motor pas cu pas ; camera din stânga ar putea folosi filtre cu următoarele lungimi de undă: 739, 753, 673, 601, 535, 482, 432, 440 nm , în timp ce filtrele pentru camera dreaptă aveau lungimi de undă egale cu: 436, 754, 803, 864, 904, 934, 1009, 880 nm .
Camerele NavCam erau monocromatice și utilizate pentru navigație. Aveau un unghi de vizualizare de 45 ° și făceau imagini stereoscopice în lumină vizibilă . Ca și în cazul imaginilor realizate de camerele PanCam , acestea au folosit formatul de compresie ICER .
Spectrometru miniatural de emisii termice
Spectrometrul cu emisii termice miniaturale ( Mini-TES ) a fost un spectrometru cu infraroșu folosit pentru a determina compoziția rocilor de la distanță. Măsurând în partea infraroșie a spectrului electromagnetic , acesta ar putea pătrunde în stratul de praf care acoperă rocile de pe suprafața marțiană, în general problematic pentru observații la distanță [13] .
Instrumentul a fost dezvoltat de Raytheon pentru Departamentul de Științe Geologice al Universității din Arizona, iar numele Miniature indică faptul că este o versiune redusă a spectrometrului de emisie termică creat de Raytheon pentru Mars Global Surveyor .
Spectrometrul a măsurat radiația infraroșie emisă de rocă pentru a fi examinată pentru a determina compoziția acesteia. Scopul a fost identificarea mineralelor care se formează prin acțiunea apei, cum ar fi carbonații și argilele. Instrumentul ar putea fi orientat în sus pentru a obține profiluri de temperatură ale atmosferei și pentru a detecta cantitatea de praf și vapori de apă.
Spectrometrul era situat în corpul roverului, iar oglinda de pe brațul roverului reflecta radiația de la deschidere la instrument.
HazCam
HazCams , ( camere de evitare a pericolelor ) erau camere foto instalate pe partea din față și din spate a rover-urilor. Rezoluția imaginilor, în alb și negru, a fost de 1024 x 1024 pixeli, în spectrul luminii vizibile . Câmpul vizual a fost de 120 ° pe ambele axe.
Imaginile au fost analizate de computerul intern al rover-urilor pentru a evita pericolele în mod autonom. Împreună, imaginile ar putea produce o hartă tridimensională a terenului din vecinătatea roverului. HazCams nu au fost considerate camere foto în scopuri științifice.
Instrument de abraziune a rocilor
Instrumentul de abraziune a rocii ( RAT ) a fost un instrument abraziv pentru rocă proiectat și dezvoltat de Honeybee Robotics . RAT a fost primul instrument care a accesat interiorul rocilor de pe altă planetă. Capul instrumentului era format dintr-o roată din pudră de diamant și rășină care se rotea la 3000 de rotații pe minut, capabilă să sape o gaură de 45 mm în diametru și adâncime 5 mm . Câteva perii mici au îndepărtat praful din gaură, iar interiorul stâncii a fost gata să fie analizat de celelalte instrumente [14] .
Dimensiunile instrumentului erau Diametru de 7 cm și 10 cm lungime, cu o greutate de 0,685 kg . Consumul mediu de energie a fost 30 W.
Notă
- ^ MER Rover Wheels , de pe NASA . Adus 01/11/2021 .
- ^ Wheels in the Sky , pe NASA Jet Propulsion Laboratory . Adus pe 14 februarie 2017 .
- ^ Încă o dată, NASA se bazează pe tehnologia maxon , pe Maxon Motor . Adus pe 14 februarie 2019 .
- ^ D. Crisp, A. Pathare și RC Ewell, Performanța celulelor solare de arsenidă de galiu / germaniu la suprafața marțiană , în progres în fotovoltaică: cercetare și aplicații , vol. 54, nr. 2, 2004, pp. 83–101, Bibcode : 2004AcAau..54 ... 83C , DOI : 10.1016 / S0094-5765 (02) 00287-4 .
- ^ Tehnologii de beneficii generale: Putere , la marsprogram.jpl.nasa.gov (arhivat din original la 14 iunie 2008) .
- ^ a b Traci Watson, Troubles ambitions parallel in NASA Mars project , în USA Today . Adus pe 2 ianuarie 2021 .
- ^ Michael C. Malin, Kenneth S. Edgett, Bruce A. Cantor, Michael A. Caplinger, G. Edward Danielson, Elsa H. Jensen, Michael A. Ravine, Jennifer L. Sandoval și Kimberley D. Supulver, O privire de ansamblu asupra 1985–2006 Mars Orbiter Camera research research , în Marte - International Journal of Mars Science and Exploration , vol. 5, 6 ianuarie 2010, pp. 1–60, Bibcode : 2010IJMSE ... 5 .... 1M , DOI : 10.1555 / mars.2010.0001 .
- ^ Klingelhöfer G., Bernhardt But., Foh J., Bonnes U., Rodionov D., De Souza PA, Schroder C., Gellert R., Kane S., Gutlich P. și Kankeleit E., Spectrometrul Mössbauer miniaturizat MIMOS II pentru aplicații terestre extraterestre și exterioare: un raport de stare , în interacțiuni hiperfine , vol. 144, nr. 1, 2002, pp. 371–379, Bibcode : 2002HyInt.144..371K , DOI : 10.1023 / A: 1025444209059 .
- ^ Klingelhoefer, SPECTROMETRUL MINIATURIZAT MOESSBAUER MIMOS II: CERERE PENTRU MISIUNEA "PHOBOS-GRUNT". ( PDF ), pe lpi.usra.edu , 2007.
- ^ R. Rieder, R. Gellert, J. Brückner, G. Klingelhöfer, G. Dreibus, A. Yen și SW Squyres, noul spectrometru cu raze X cu particule alfa Athena pentru Mars Exploration Rovers , în Journal of Geophysical Research , vol. . 108, E12, 2003, p. 8066, Bibcode : 2003JGRE..108.8066R , DOI : 10.1029 / 2003JE002150 .
- ^ a b Charles D Edwards, Jr., Thomas C Jedrey, Eric Schwartzbaum și Ann S Deveraux, The Electra Proximity Link Load Pay for Mars Relay Telecommunications , în 54th Congress International Astronomical of the International Astronautical Federation, the International Academy of Astronautics, and the Institutul Internațional de Drept Spațial , 3 octombrie 2003, DOI : 10.2514 / 6. IAC-03-Q.3.a.06 .
- ^ a b c J. F Bell, S. W Squyres, K. E Herkenhoff, J. N Maki, H. M Arneson, D Brown, S. A Collins, A Dingizian, S. T Elliot, E. C Hagerott, A. G Hayes, M. J Johnson, J. R Johnson, J Joseph, K Kinch, M. T Lemmon, R. V Morris, L Scherr, M Schwochert, M. K Shepard, G. H Smith, J. N Sohl-Dickstein, R. J Sullivan, W. T Sullivan și M Wadsworth, investigația Mars Exploration Rover Athena Panoramic Camera (Pancam) , în Journal of Geophysical Research: Planets , vol. 108, 2003, Bibcode : 2003JGRE..108.8063B , DOI : 10.1029 / 2003JE002070 .
- ^ S Silverman, R Peralta, P Christensen și G Mehall, Spectrometru de emisie termică miniatură pentru Mars Exploration Rover , în Acta Astronautica , vol. 59, nr. 8-11, 2005, pp. 990–999, Bibcode : 2006AcAau..59..990S , DOI :10.1016 / j.actaastro.2005.07.055 .
- ^ Science Instruments: In-situ Instrumentation , la jpl.nasa.gov . Adus pe 2 ianuarie 2021 .