Mars Exploration Rover
Mars Exploration Rover a fost o misiune de explorare pe Marte , unde au fost desfășurate două rovers identice numite Spirit și Opportunity . Lansarea a avut loc în 2003, iar roverii au aterizat pe Marte în ianuarie 2004 , în două locuri diferite de pe planetă. Ambele și-au depășit cu mult funcționarea planificată cu 90 de soli : Spirit a rămas operațional până la 22 martie 2010 [1] , în timp ce Opportunity până la 10 iunie 2018 [2] .
Dezvoltare
Costul total al misiunii, pentru primii 90 de soli ai misiunii primare, a fost de 820 milioane dolari[3] . Ambii rovers au extins misiunea de cinci ori, continuând să funcționeze până la sfârșitul anului 2009 , când a fost declarat sfârșitul misiunii[3] [4] .
La 1 mai 2009, rover-ul Spirit s-a blocat într-o zonă de nisip [5] . După nouă luni de încercări de a muta rover-ul, pe 26 ianuarie 2010, NASA a anunțat că misiunea Spirit a fost schimbată și că rover-ul va deveni o platformă științifică staționară [6] . La 22 martie, contactele s-au pierdut și încercările de restabilire a continuat până la 25 mai 2011, când misiunea roverului Spirit a fost declarată încheiată [7] .
Începând cu 24 ianuarie 2014, NASA a anunțat că misiunea Opportunity rover, care era încă operațională, și cel mai recent rover Curiosity vor deveni căutarea dovezilor vieții din trecutul planetei, inclusiv a unei biosfere formată din microorganisme autotrofe , chemotrofe și / sau chimiolitotrofe și prezența apei, inclusiv regiuni care găzduiau râuri sau lacuri antice [8] [9] [10] [11] .
Roverul Opportunity a continuat explorarea în interiorul craterului Endeavour .
Obiective
Obiectivele științifice ale misiunii au fost cercetarea și caracterizarea solului și a rocilor care ar putea conține indicii despre prezența trecută a apei pe Marte. Misiunea a făcut parte din programul Mars Exploration Program al NASA , care a inclus programul lander Viking în 1976 și roverul Mars Pathfinder din 1997[12] . Printre celelalte obiective ale misiunii [13] :
- determinați distribuția și compoziția mineralelor, rocilor și solului în apropierea locului de aterizare
- determina procesele geologice marțiene care au modificat terenul și au influențat chimia acestuia. Astfel de procese includ eroziunea apei sau a vântului, sedimentarea, mecanismele hidrotermale, vulcanismul și craterizarea.
- validați observațiile suprafeței prin instrumentarea Mars Reconnaissance Orbiter , pentru a evalua acuratețea și eficacitatea instrumentelor sale.
- cercetează mineralele care conțin fier și identifică și cuantifică mineralele care pot fi formate cu apă
- caracterizează mineralogia rocilor și solurilor și determină procesele de creare a acestora
- căutați indicii geologice referitoare la condițiile de mediu prezente când apa lichidă era prezentă în trecut
- evaluează dacă aceste condiții de mediu au fost favorabile vieții
Caracteristici tehnice
Fiecare sondă a constat din mai multe componente:
- Rover: ( 185 kg )
- Lander: ( 348 kg )
- Carcasă spate / parașută: ( 209 kg )
- Scut termic: ( 78 kg )
- Etapa de transfer: ( 193 kg )
- Propulsor: ( 50 kg )
- Instrumentație: ( 5 kg )
Masa totală a fiecărei sonde a fost 1 063 kg .
Etapa de transfer

Etapa de transfer a fost componenta navei spațiale folosită pentru a ajunge pe Marte. A fost foarte asemănător cu cel al Mars Pathfinder, cu un diametru de 2,65 m și o înălțime de 1,6 m , conținea vehiculul pentru intrarea atmosferică.
Structura primară a fost realizată din aluminiu cu un inel exterior acoperit de panouri solare, de cca 2,65 m în diametru. Panourile solare au fost împărțite în cinci secțiuni și au furnizat o putere de aprox 600 W lângă Pământ e 300 W pe Marte.
Încălzirea sondei și izolarea termică multistrat a menținut electronica la temperatura potrivită. Un sistem cu gaz freon a transferat excesul de căldură de pe computerul de zbor și hardware-ul sistemului de comunicații pentru a preveni supraîncălzirea. Calculatorul de zbor a fost interfațat cu sistemele avionice ale stadionului, cum ar fi senzorul solar, senzorul de stea și sistemul de control al temperaturii.
Urmăritorul de stele (scanerul de stele) și senzorul solar permit navetei să cunoască orientarea sa în spațiu, obținută prin analiza poziției Soarelui și a altor stele. Deoarece era posibil ca, în ciuda sistemelor de navigație, naveta să fi fost ușor de mers, au fost planificate verificări manuale și corecții.
Aceste corecții au fost posibile prin propulsoarele de manevră alimentate cu hidrazină , conținute în două rezervoare de aluminiu. Tehnicienii ar putea apoi comanda aprinderea propulsoarelor pentru a efectua trei tipuri de manevre:
- în direcția axei pentru a varia viteza sondei
- într-o direcție laterală folosind două seturi de propulsoare (patru propulsoare pe grup)
- cu impulsuri de la două propulsoare cuplate
Comunicații
Comunicațiile cu controlul misiunii au avut loc în banda X , care necesită mai puțină energie și o antenă mai mică decât navetele anterioare, care comunicau în banda S.
Comenzile de pe Pământ au venit prin două antene în timpul transferului pe Marte: o antenă omnidirecțională cu câștig redus inserată în inelul interior și utilizată când sonda era aproape de Pământ și o antenă cu câștig mediu situată în inelul exterior.
În timpul călătoriei, sonda a fost stabilizată cu ajutorul giroscopurilor cu o rotație de 2 rotații pe minut. Controlul atitudinii a menținut antena de câștig mediu îndreptată spre Pământ și panourile solare îndreptate spre soare.
Aeroshell


Împreună cu landerul și rover-ul, aeroscaful era vehiculul de intrare atmosferic. Scopul principal a fost protejarea landerului și a rover-ului din interiorul acestuia de căldura intensă generată în faza de intrare. A fost proiectat similar cu cele utilizate pentru sondele Mars Pathfinder și Viking.
Aeroshell-ul consta din două componente: un scut termic și un backshell . Scutul termic era plat, de culoare cafenie și proteja lander-ul și rover-ul când pătrundea în atmosfera marțiană, precum și acționa ca o frână cu aer . Carcasa din spate era mai mare, în formă de con și vopsită în alb. Acesta conținea diverse componente, inclusiv:
- o parașută (în partea de jos a carcasei)
- componentele electronice și bateriile care au activat dispozitivele pirotehnice, cum ar fi șuruburile și rachetele
- o platformă de măsurare inerțială care a monitorizat și a alimentat datele backshell cu privire la poziția și orientarea aeronavei
- trei motoare cu combustibil solid numite RAD ( Rocked Assisted Descent ), capabile să genereze 10 kN de împingere fiecare timp de 60 de secunde.
- trei motoare cu combustibil solid mai mici numite TIRS și orientate orizontal în raport cu carcasa din spate pentru a-l stabiliza în timpul aprinderii propulsoarelor RAD .
Construit de Lockheed Martin , aeroshell-ul avea o structură de fagure de aluminiu amplasată între două foi de epoxid și grafit ( panou sandwich ). Partea exterioară a fost formată dintr-un strat de fenoli de tip fagure și umplută cu un material ablativ care a protejat părțile interne de căldură. Materialul ablativ a fost un amestec de plută , un agent de legare și mici sfere de silice , inventat pentru scuturile termice ale misiunilor vikingilor. Tehnologie similară a fost folosită și în programele Mercur , Gemeni și Apollo . Materialul a fost special formulat pentru a reacționa chimic cu amosfera marțiană. Același material ablativ a fost folosit și în scutul termic, dar într-un strat mai gros, de 12,7 mm . În loc să fie vopsită, carcasa din spate a fost acoperită cu un film PET pentru ao proteja de frigul spațiului. Acest film a fost apoi vaporizat de căldura intrării atmosferice.
Paraşuta
Parașuta a permis reducerea vitezei sondei în faza de coborâre și a fost conținută în carcasa din spate [14] .
De asemenea, derivat din experiențele misiunilor anterioare a fost cu 40% mai mare decât cel folosit cu Pathfinder. Sarcina (forța care se exercită asupra parașutei atunci când este umflată) a fost estimată la aproximativ 80-85 kN.
Parașuta, construită de Pioneer Aerospace, a fost realizată din poliester și nailon , două țesături puternice și ușoare și a fost conectată la carcasa din spate cu căprioare triple kevlar . Datorită spațiului limitat, parașuta fusese comprimată și ambalată în carcasa sa. De asemenea, înainte de a fi plasat în carcasă , acesta fusese sterilizat [14] .
După desfășurarea parașutei la o înălțime de La 10 km , sistemul a eliberat scutul termic și a separat carcasa din spate, care a rămas „agățată” de el prin intermediul cablurilor metalice.
Airbag

Airbagurile au fost organizate în patru grupuri de șase baloturi, realizate din vectran , același material folosit în misiunea Mars Pathfinder . Scopul lor a fost să protejeze landerul și roverul de impactul cu solul marțian în faza de aterizare și au fost proiectate să reziste la impacturi la viteze de până la 100 km / h.
După umflarea airbagurilor, carcasa din spate a activat sistemul de rachete, care a încetinit în continuare coborârea sondei la viteza zero la o înălțime de 10-15 m deasupra solului. Înălțimea a fost măsurată cu un altimetru radio . Odată ajuns la înălțimea corectă, landerul și rover-ul din interior au fost aruncate pe suprafață.
Lander

Landerul era o carcasă de protecție care adăpostea roverul și îl proteja, împreună cu airbagurile, de impactul cu solul. De formă tetraedrică , a fost proiectat să se deschidă după dezumflarea automată a airbagurilor. Roverul a fost fixat de lander cu șuruburi explozive.
Odată ce landerul și rover-ul din interior au terminat de sărit și de rulat pe suprafața marțiană, airbagurile s-au dezumflat încet. Landerul era conștient de orientarea în care se afla față de sol cu ajutorul accelerometrelor și pe baza acestuia deschidea o parte a tetraedrului pentru a putea fi orientată corect. Apoi toate celelalte părți au fost deschise.
După ce landerul s-a desfășurat complet, un mecanism ar trage încet airbagurile sub lander, pentru a nu împiedica ieșirea roverului. Faza de deschidere a landerului și retragerea airbagurilor a durat trei ore.
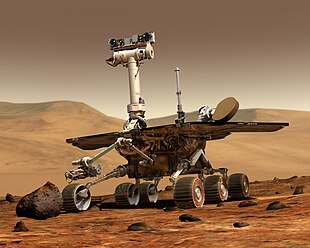
Rover
Rover-urile Spirit și Opportunity erau gemeni, cu șase roți și alimentate de panouri solare . Înălțimea lor era 1,5 m , lățime 2,3 m și lungime 1,6 m și cântărit 180 kg . Fiecare roată avea un motor, iar sistemul de suspensie rocker-bogie a permis o mobilitate îmbunătățită și depășirea înclinațiilor de până la 30 de grade. Perechea de roți față și spate ar putea conduce. Viteza maximă a fost de 5 cm / s, deși în medie rover-urile s-au deplasat cu o șesime din această viteză.
Panourile solare au fost capabile să genereze cca 140 W în timpul celor 14 ore de soare din ziua marțiană (sol), iar bateriile reîncărcabile litiu-ion au furnizat energie în timpul nopții.
Computerul de bord folosea un procesor IBM RAD6000 cu ceas 20 MHz , 128 MB de DRAM , 3 MB memorie EEPROM e 256 MB de memorie flash .
Temperatura de funcționare a rover-urilor a fost între −40 ° C e 40 ° C , menținut de încălzitoare radioizotopice flancate de încălzitoare electrice [15] . Izolarea termică a fost asigurată de un film acoperit cu aur și un strat de silicagel .
Comunicațiile au avut loc printr-o antenă omnidirecțională cu câștig redus și viteză mică și o antenă orientabilă cu câștig ridicat. Ambele antene erau în contact direct cu Pământul, dar antena cu câștig redus a fost folosită pentru a transmite datele către sondele orbitante.
Instrumente și experimente științifice
Instrumentele științifice includ:
- Camere panoramice Cancam : două camere cu filtre colorate pentru a surprinde structura solului
- Camere de navigație Navcam : două camere cu câmp vizual mai larg, dar rezoluție mai mică și monocromatică pentru navigație și conducerea roverilor
- Spectrometrul cu emisii termice miniaturale ( Mini-TES ), un spectrograf cu infraroșu
Patru camere monocrome pentru evitarea obstacolelor ( Hazcam ) au fost instalate pe corpul roverului, două în față și două în spate.
Dispozitivul de implementare a instrumentului ( IDD ), numit și braț robotizat, conținea următoarele instrumente:
- spectrometrul Mössbauer numit MIMOS II și dezvoltat la Universitatea din Mainz , a fost utilizat pentru analiza mineralogică a rocilor și solurilor care conțin fier [16] [17] .
- Spectrometrul cu raze X cu particule alfa , dezvoltat de Institutul de chimie Max Planck , a fost utilizat pentru analiza elementelor prezente în roci și sol [18] .
- magneți, pentru a colecta particule magnetizate de praf, dezvoltate de Institutul Niels Bohr din Copenhaga și analizate de spectrometrul Mossbauser și spectrometrul cu raze X pentru a măsura raportul dintre particulele magnetice și nemagnetice și compoziția mineralelor magnetice din praful atmosferic și roci care au fost pulverizate de Rock Abrasion Tool .
- microscopul, capabil să preia imagini de înaltă rezoluție ale solului, dezvoltat de Programul de cercetare astrogeologică al Studiului Geologic al Statelor Unite .
- Instrumentul de abraziune a rocilor , dezvoltat de Honeybee Robotics pentru excavarea rocilor și expunerea straturilor interioare, astfel încât acestea să poată fi analizate cu alte instrumente.
Prezentare generală a misiunii
Lansa


Sondele au fost lansate pe 10 iunie ( Spirit ) și pe 7 iulie ( Opportunity ), ambele cu lansatorul Boeing Delta II din complexul de lansare Cape Canaveral 17 . Posibilitatea de a folosi două tampoane a făcut posibilă utilizarea ferestrelor de lansare de 15 și 21 de zile. Ultima zi posibilă pentru lansarea Spirit a fost 19 iunie, iar prima zi posibilă pentru lansarea Opportunity a fost 25 iunie.
Aterizare

Sondele au aterizat în ianuarie 2004 în două regiuni îndepărtate ale suprafeței marțiene. Spirit a fost situat lângă craterul Gusev[19] , unde a ajuns la 3 ianuarie 2004. Roverul Opportunity a fost situat în Meridiani Planum [20] , lângă ecuator, unde a ajuns pe 24 ianuarie 2004.
Explorare
După aterizare, Spirit a fost situat lângă Craterul Gusev , un sit despre care se presupunea că a fost udat de apă lichidă în trecut [21] . Echipa misiunii a trimis rover-ul în Columbia Hills , un grup de dealuri aproximativ îndepărtat 3 km [22] .
Pe 8 aprilie, NASA a anunțat că misiunea va fi prelungită de la primele trei luni la o durată de opt luni. Spre sfârșitul lunii Opportunity a ajuns la craterul Endurance și în lunile următoare la craterul Victoria . Între timp, Spirit a început să urce pe Columbia Hills .
Buna funcționare a celor doi rovers i-a convins pe managerii misiunii să extindă explorările pentru încă 18 luni, până în septembrie 2006. În această perioadă, Opportunity a fost trimis pentru a investiga terenul la sud de craterul Vostok . Spirit a ajuns la Husband Hill pe 21 august 2005, după 581 de soli și o alergare de 4,81 km și a început explorarea unui platou stâncos semicircular numit Home Plate .
La 13 martie 2006, roata din față dreaptă a Spiritului a încetat să mai funcționeze în timp ce roverul se îndrepta spre McCool Hill . Inițial problema a fost eludată făcând ca roverul să meargă în direcția opusă, determinând astfel roata să tragă roata blocată. După aceea, Spirit a ajuns într-o zonă nisipoasă care nu era clară. Din acest motiv, rover-ul a fost îndreptat către o zonă care avea o ușoară pantă spre nord, numită „low Ridge Haven”, unde a petrecut lunga iarnă marțiană. În septembrie a aceluiași an, Opportunity a atins marginea craterului Victoria [23] [24] , iar misiunea celor doi rovers a fost prelungită până în septembrie 2007.
În iunie 2007, Opportunity era în curs de a începe intrarea în craterul Victoria [25] , dar furtunile mari de nisip au amânat operațiunea și s-a preferat să aștepte până când furtunile s-au potolit. Opacitatea cerului în timpul acestor evenimente a limitat cantitatea de energie solară colectată de panouri. Două luni mai târziu, roverii au reluat operațiunile [26] .
La sfârșitul lunii august 2007, roverul Opportunity și-a început coborârea în crater și l-a explorat până în august 2008 [27] [28] .
Până în ianuarie 2009, cei doi rovers au trimis 250.000 de imagini pe Pământ și au călătorit 21 km [29] .
După ieșirea din creatorul Victoria, Opportunity a fost direcționat în martie 2009 către craterul Endeavour [30] [31] . Între timp, Spirit a fost blocat pe o zonă în care solul era nisipos [32] .
În ianuarie 2010, cei doi rovers au atins etapa de referință a celui de-al șaselea an de operațiuni [33] . Deoarece încercările de deblocare a Spiritului nu au avut succes în lunile următoare, NASA a anunțat transformarea rover-ului într-o platformă de cercetare staționară [34] . În luna martie a aceluiași an, Opportunity era la distanță de La 12 km de craterul Endeavour, în timp ce Spirit și- a încheiat operațiunile [35] .
Până la 8 septembrie 2010, roverul Opportunity parcursese jumătate din traseu 19 km între Victoria Crater și Endeavour [36] . În august 2011, rover-ul Opportunity a ajuns la craterul Endeavour și a început explorarea formațiunilor de rocă din cadrul acestuia.
În iunie 2018, o furtună globală de nisip a împiedicat panourile solare să genereze suficientă energie pentru a menține roverul operațional [37] . Ultimul contact a avut loc pe 10 iunie.
Într-o conferință de presă din 13 februarie 2019, NASA a declarat misiunea rover-ului Opportunity peste [38] .
Rezultate științifice
Craterul Gusev
Deși craterul Gusev apare din imaginile orbitale ca albia unui lac uscat, observațiile de la suprafață au arătat că rocile de la baza craterului sunt de tip bazaltic , conținând mineralele olivină , piroxeni , plagioclază și magnetit . Aspectul este similar cu bazaltul vulcanic, cu boabe mici și porozitate neregulată de tip vug [39] [40] . Cea mai mare parte a solului provine din dezintegrarea rocilor și, în unele locuri, probele de sol analizate au prezentat niveluri destul de ridicate de nichel , probabil de la un meteorit [41] . Analizele au arătat că rocile au fost ușor modificate de cantități mici de apă. Învelișul exterior și fisurile din roci sugerează prezența mineralelor pe bază de apă, posibil compuși de brom . Toate rocile sunt acoperite cu o pulbere fină și unul sau mai multe straturi de material mai dur [42] .
Cantitățile și tipurile de minerale sunt tipice pentru picrobasalti , similar cu pământul komatiite . Alte roci analizate au fost similare cu shergottiții , meteoriți care provin de pe Marte. Conform sistemului de clasificare Irvine-Barager, aceste roci pot fi clasificate ca bazalturi. Analizele au arătat că au fost ușor modificate de cantități mici de apă; stratul de suprafață prezent în aceste roci s-ar fi putut forma cu interacțiunea prafului și a cantităților mici de apă [39] .
Praful analizat în craterul Gusev este același cu cel găsit în altă parte a planetei. În special, cei săraci sunt magnetici, deoarece conțin magnetit mineral, adesea asociat cu titanul [43] . Întreaga suprafață a lui Marte este acoperită cu un strat subțire de praf, poate mai puțin de un milimetru [44] [45] .
Columbia Hills
Rocile analizate în Columbia Hills au fost împărțite în șase categorii, cu compoziții chimice foarte diferite [46] . Cea mai importantă constatare a fost că toate rocile analizate în Columbia Hills au fost modificate de apă [47] . Toate erau bogate în elemente de fosfor , sulf , clor , brom , care sunt transportate de apă. Rocile din Columbia Hills conțineau olivină și sulfați [48] , în proporție inversă între ele. De fapt, olivina se descompune cu ușurință în apă, în timp ce apa facilitează formarea de sulfați. Pentru aceste caracteristici, olivina este un indicator al absenței apei.
Prezența goethitei a fost detectată în alte roci analizate cu spectrometrul Mössbauer. Acest mineral se formează numai în prezența apei, iar descoperirea sa reprezintă prima dovadă științifică directă a prezenței trecute a apei în Columbia Hills. Mai mult, în aceste roci prezența olivinei a fost mult mai mică.
Un tip de sol, poreclit Paso Robles , conținea cantități mari de sulf, fosfor, calciu și fier [49] . În special, cea mai mare parte a fierului era sub formă oxidată.
La jumătatea misiunii de șase ani pe planetă, rover-ul a descoperit cantități mari de silice în sol. S-ar fi putut forma din interacțiunea solului cu vaporii acizi produși de activitățile vulcanice în prezența apei sau din interacțiunea cu apa conținută în izvoarele hidrotermale [50] .
Spirit a găsit apoi dovezi ale prezenței apei în Columbia Hills , cum ar fi prezența sulfaților, a carbonaților și a goethitei. Cu toate acestea, nu s-au găsit dovezi care să susțină ipoteza prezenței trecute a unui lac în craterul Gusev. Se crede că craterul a fost acoperit cu material magmatic.
Meridiani Planum

Locul de aterizare al roverului Opportunity este Eagle Crater, în Meridiani Planum. Această regiune plană se caracterizează prin prezența unor cantități mari de mici concrețiuni sferice prezente atât în sol, cât și încorporate în roci. Aceste sferule au o concentrație mare de hematită . Aceste concreții sunt distribuite uniform în roci, deci trebuie să se fi format pe loc. Dacă ar fi în schimb legate de activitatea vulcanică sau meteorică, acestea ar fi distribuite în straturi. Prezența acestor sferule este una dintre dovezile prezenței trecute a apei, unde au fost formate.
Rocile stratificate din pereții craterului sunt sedimentare și analizele au arătat că acestea conțin în principal jarozit , un sulfat feros care este de obicei o evaporită , reziduul creat prin evaporarea unui lac sărat sau a mării [51] [52] .
Notă
- ^ Actualizare Rover: 2010: Toate , la mars.nasa.gov . Adus pe 14 februarie 2019 .
- ^ Ashley Strickland, După 15 ani, misiunea roverului Mars Opportunity s-a încheiat , pe CNN . Adus pe 14 februarie 2019 .
- ^ a b NASA extinde misiunea Mars rovers , nbcnews.com , NBC News, 16 octombrie 2007. Adus pe 5 aprilie 2009 .
- ^ Misiune Mars Exploration Rover: Comunicate de presă , la marsrovers.jpl.nasa.gov . Adus la 25 mai 2015 .
- ^ Henry Fountain, Crater was Shaped by Wind and Water, Mars Rover Data Shows , nytimes.com , New York Times, 25 mai 2009. Accesat la 26 mai 2009 .
- ^ Acum, o platformă de cercetare staționară, spiritul Mars Rover al NASA începe un nou capitol în studiile științifice ale planetei roșii , nasa.gov , 26 ianuarie 2010.
- ^ NASA încheie încercări de a contacta spiritul Mars Rover , nasa.gov , NASA, 24 mai 2011.
- ^ John P. Grotzinger, Introduction to Special Issue - Habitability, Taphonomy, and the Search for Organic Organic on Mars , în Science , vol. 343, nr. 6169, 24 ianuarie 2014, pp. 386–387, Bibcode : 2014Sci ... 343..386G , DOI : 10.1126 / science.1249944 , PMID 24458635 .
- ^ Diverse, Număr special - Cuprins - Explorarea habitabilității marțiene , în Știință , vol. 343, nr. 6169, 24 ianuarie 2014, pp. 345–452. Adus pe 24 ianuarie 2014 .
- ^ Diverse, Colecție specială - Curiozitate - Explorarea habitabilității marțiene , în Știință , 24 ianuarie 2014. Adus 24/01/2014 .
- ^ Grotzinger, JP, A Habitable Fluvio-Lacustrine Environment at Yellowknife Bay, Gale Crater, Mars , in Science , vol. 343, nr. 6169, 24 ianuarie 2014, p. 1242777, Bibcode : 2014Sci ... 343A.386G , DOI : 10.1126 / science.1242777 , PMID 24324272 .
- ^ Mars Exploration Rover Mission Overview , la mars.nasa.gov , NASA. Adus la 25 noiembrie 2009 .
- ^ Obiectivele științifice ale Mars Exploration Rover , la mars.nasa.gov , marsrovers.nasa.gov. Adus la 25 mai 2015 .
- ^ a b Mars Exploration Rover Mission: The Mission , la mars.nasa.gov , nasa.gov. Adus pe 12 septembrie 2020 .
- ^ Laboratorul de propulsie cu jet, MER - Baterii și încălzitoare , la marsrover.nasa.gov , NASA. Adus la 13 august 2012 (depus de „url original 9 iunie 2012).
- ^ Klingelhöfer G., Bernhardt But., Foh J., Bonnes U., Rodionov D., De Souza PA, Schroder C., Gellert R., Kane S., Gutlich P. și Kankeleit E., Spectrometrul Mössbauer miniaturizat MIMOS II pentru aplicații terestre extraterestre și exterioare: un raport de stare , în interacțiuni hiperfine , vol. 144, nr. 1, 2002, pp. 371-379, Bibcode : 2002HyInt.144..371K , DOI : 10.1023 / A: 1025444209059 .
- ^ Klingelhoefer, SPECTROMETRUL MINIATURIZAT MOESSBAUER MIMOS II: CERERE PENTRU MISIUNEA "PHOBOS-GRUNT". ( PDF ), pe lpi.usra.edu , 2007.
- ^ R. Rieder, R. Gellert, J. Brückner, G. Klingelhöfer, G. Dreibus, A. Yen și SW Squyres, noul spectrometru cu raze X cu particule alfa Athena pentru Mars Exploration Rovers , în Journal of Geophysical Research , vol. . 108, E12, 2003, p. 8066, Bibcode : 2003JGRE..108.8066R , DOI : 10.1029 / 2003JE002150 .
- ^ Destinație: Gusev Crater , pe NASA , 5 ianuarie 2004. Adus pe 10 ianuarie 2021 .
- ^ Destinație: Meridiani Planum , pe NASA , 22 ianuarie 2003. Adus pe 10 ianuarie 2021 .
- ^ Craterul Gusev: LandingSites , la marsoweb.nas.nasa.gov .
- ^ APOD: 14 ianuarie 2004 - O panoramă pe Marte de la Spirit Rover , la antwrp.gsfc.nasa.gov .
- ^ NASA Mars Rover ajunge la Dramatic Vista pe Red Planet , la nasa.gov . Adus 28-09-2006 .
- ^ Mars rover, Global Surveyor, misiuni Odyssey extinse , la spaceflightnow.com . Adus 27-09-2006 .
- ^ NASA Mars Rover Ready For Descent Into Crater , la marsrovers.jpl.nasa.gov , jpl.nasa.gov. Adus la 15 iulie 2007 (arhivat din original la 6 iulie 2007) .
- ^ Mars Exploration Rover Status Report: Rovers Resume Driving , la nasa.gov , NASA, 24 august 2007. Accesat la 30 august 2007 .
- ^ Oportunitatea Mars Rover a NASA care urcă din Craterul Victoria , la jpl.nasa.gov . Adus 27/08/2008 .
- ^ NASA Mars Rover Opportunity Ascends to Level Ground , la marsrovers.jpl.nasa.gov , jpl.nasa.gov. Adus 29/08/2008 .
- ^ Roverii NASA marchează cinci ani pe Red Planet , CNN, 3 ianuarie 2009. Adus pe 3 ianuarie 2009 .
- ^ One Mars Rover vede un obiectiv îndepărtat; The Other Takes A New Route , la marsrovers.jpl.nasa.gov , NASA / JPL, 18 martie 2009. Accesat la 20 martie 2009 .
- ^ One Mars Rover vede un obiectiv îndepărtat; The Other Takes A New Route , su marsrovers.jpl.nasa.gov , NASA/JPL, 18 marzo 2009. URL consultato il 20 marzo 2009 .
- ^ Spirit Stuck In 'Insidious Invisible Rover Trap' on Mars , su space.com . URL consultato il 27 maggio 2009 .
- ^ NASA's Mars Rover has Uncertain Future as Sixth Anniversary Nears , su mars.nasa.gov , NASA, 31 dicembre 2009.
- ^ Now a Stationary Research Platform, NASA's Mars Rover Spirit Starts a New Chapter in Red Planet Scientific Studies , su nasa.gov , NASA, 26 gennaio 2010.
- ^ Opportunity Surpasses 20 Kilometers of Total Driving , su nasa.gov , NASA, 24 marzo 2010.
- ^ Opportunity Rover Reaches Halfway Point of Long Trek , su mars.nasa.gov , NASA/JPL, 8 settembre 2010.
- ^ Opportunity Rover Still Silent on Mars, 4 Months After Epic Dust Storm Began , su space.com , 15 ottobre 2018.
- ^ Kenneth Chang, NASA's Mars Rover Opportunity Concludes a 15-Year Mission , su nytimes.com , The New York Times, 13 febbraio 2019. URL consultato il 13 febbraio 2019 .
- ^ a b HY McSween, RE Arvidson, JF Bell III, D. Blaney, NA Cabrol e PR Christensen, Basaltic Rocks Analyzed by the Spirit Rover in Gusev Crater , in Science , vol. 305, n. 5685, agosto 2004, pp. 842-845, DOI : 10.1126/science.3050842 .
- ^ Arvidson RE, Localization and Physical Properties Experiments Conducted by Spirit at Gusev Crater , in Science , vol. 305, n. 5685, 2004, pp. 821-824, Bibcode : 2004Sci...305..821A , DOI : 10.1126/science.1099922 , PMID 15297662 .
- ^ Gelbert R., The Alpha Particle X-ray Spectrometer (APXS): results from Gusev crater and calibration report , in J. Geophys. Res. Planets , vol. 111, E2, 2006, Bibcode : 2006JGRE..111.2S05G , DOI : 10.1029/2005JE002555 .
- ^ Christensen P, Initial Results from the Mini-TES Experiment in Gusev Crater from the Spirit Rover , in Science , vol. 305, n. 5685, agosto 2004, pp. 837-842, Bibcode : 2004Sci...305..837C , DOI : 10.1126/science.1100564 , PMID 15297667 .
- ^ Bertelsen P., Magnetic Properties on the Mars Exploration Rover Spirit at Gusev Crater , in Science , vol. 305, n. 5685, 2004, pp. 827-829, Bibcode : 2004Sci...305..827B , DOI : 10.1126/science.1100112 , PMID 15297664 .
- ^ Bell, J, The Martian Surface , Cambridge University Press, 2008, ISBN 978-0-521-86698-9 .
- ^ Gelbert R., Chemistry of Rocks and Soils in Gusev Crater from the Alpha Particle X-ray Spectrometer , in Science , vol. 305, n. 5685, 2004, pp. 829-32, Bibcode : 2004Sci...305..829G , DOI : 10.1126/science.1099913 , PMID 15297665 .
- ^ Squyres S., Rocks of the Columbia Hills , in J. Geophys. Res. Planets , vol. 111, E2, 2006, Bibcode : 2006JGRE..111.2S11S , DOI : 10.1029/2005JE002562 .
- ^ Ming D., Geochemical and mineralogical indicators for aqueous processes in the Columbia Hills of Gusev crater, Mars , in J. Geophys. Res. , vol. 111, E2, 2006, Bibcode : 2006JGRE..111.2S12M , DOI : 10.1029/2005je002560 .
- ^ PR Christensen, Mineral Composition and Abundance of the Rocks and Soils at Gusev and Meridiani from the Mars Exploration Rover Mini-TES Instruments , in Lunar and Planetary Science XXXVI , Agu.org, febbraio 2005.
- ^ Douglas W. Ming, DW Mittlefehldt, Richard V. Morris, DC Golden, R. Gellert, Albert Yen, Benton C. Clark, SW Squyres, WH Farrand, Steven Ruff, RE Arvidson, G. Klingelhöfer, HY McSween, DS Rodionov, C. Schröder, Jr, A. de Souza e Alian Wang, Geochemical and mineralogical indicators for aqueous processes in the Columbia Hills of Gusev crater , in Journal of Geophysical Research Atmospheres , vol. 111, n. 2, febbraio 2006, DOI : 10.1029/2005JE002560 .
- ^ NASA - Mars Rover Spirit Unearths Surprise Evidence of Wetter Past , su nasa.gov , NASA. URL consultato il 25 maggio 2015 .
- ^ Squyres S., The Opportunity Rover's Athena Science Investigation At Meridiani Planum, Mars , in Science , vol. 306, n. 5702, 2004, pp. 1698-1703, Bibcode : 2004Sci...306.1698S , DOI : 10.1126/science.1106171 , PMID 15576602 .
- ^ Squyres S., Overview of the Opportunity Mars Exploration Rover Mission to Meridiani Planum: Eagle Crater to Purgatory Dune , in Journal of Geophysical Research , vol. 111, E12, 2006, pp. E12S12, Bibcode : 2006JGRE..11112S12S , DOI : 10.1029/2006je002771 .
Voci correlate
Altri progetti
-
 Wikimedia Commons contiene immagini o altri file su Mars Exploration Rover
Wikimedia Commons contiene immagini o altri file su Mars Exploration Rover
Collegamenti esterni
- Sito ufficiale , su marsrovers.jpl.nasa.gov .
- ( EN ) Mars Exploration Rover , su Enciclopedia Britannica , Encyclopædia Britannica, Inc.
