Motor pas cu pas

Motorul pas cu pas numit deseori pas sau pas este un motor electric sincron cu impulsuri directe cu gestionare electronică fără perii care poate împărți rotația acestuia într-un număr mare de trepte (trepte). Poziția motorului poate fi controlată cu exactitate fără a fi nevoie să recurgă la controlul buclei închise (feedback) dacă dimensiunea și tipul motorului sunt alese corespunzător pentru aplicație.
Este considerată alegerea ideală pentru toate acele aplicații care necesită precizie în deplasarea unghiulară și viteza de rotație, cum ar fi robotica , suporturile telescopului și servomecanismele în general. Un motor similar este motorul fără perii , care diferă într-un stator care este alimentat permanent în toate părțile sale și nu în rotație, aceasta oferă viteze și puteri de rotație mai mari, dar nu permite un control la fel de precis al poziției rotorului.
Avantajele motoarelor pas cu pas
- Dacă sunt construite cu tehnologie comună, acestea au un cost redus, comparativ cu alte tipuri de motoare cu performanțe similare.
- Este posibil să realizați unități de precizie controlate de computer într-un lanț deschis, adică fără a utiliza senzori de poziție sau de viteză. Prin urmare, pot fi utilizate cu relativă simplitate și fără a necesita o putere de calcul specială.
- Au o rezistență mecanică și electrică ridicată: de fapt nu există contacte electrice glisante și, dacă este necesar, pot fi realizate și într-un mediu complet sigilat.
- Este ușor să faceți ca arborele să efectueze mici rotații unghiulare arbitrare în ambele direcții și să îl blocheze într-o anumită poziție.
- Rotația Viteza poate fi foarte scăzută chiar și fără utilizarea unor reductoare mecanice.
- Foarte des au un moment de inerție destul de scăzut.
- Sunt foarte stabile în poziția rotorului blocat și nu au oscilații, așa cum se întâmplă în sistemele fără perii .
- Dacă sunt dimensionate corect, nu au nevoie de nici o calibrare.
Defecțiuni ale motoarelor pas cu pas
- Acestea necesită întotdeauna circuite electronice pentru conducere, în general de tip digital.
- Acestea funcționează în scuturi și produc vibrații , în special la turații mici și dacă se adoptă tehnici de pilotare mai simple.
- Eficiența lor energetică depinde de tehnologia de construcție adoptată. Cuplul măsurat în Nm (newton pe metru) , cu aceeași absorbție de curent, depinde adesea de tipul de conducere electrică / electronică adoptat.
- Acestea permit o viteză maximă de rotație de aproximativ 1000-1500 rpm . Cu toate acestea, există motoare care ajung la 4000-5000 rpm prin sisteme de feedback cu buclă închisă. Cu toate acestea, caracteristica lor de cuplu scade aproape exponențial odată cu creșterea vitezei.
- Acestea produc multă căldură după doar câteva minute de funcționare.
Principiul de funcționare
Motoarele pas cu pas sunt motoare care, spre deosebire de toate celelalte, au scopul de a menține arborele staționar într-o poziție de echilibru: dacă sunt alimentate, se limitează să se blocheze într-o poziție unghiulară foarte precisă.
Doar indirect este posibilă obținerea rotației sale: o serie de impulsuri de curent trebuie trimise la motor, conform unei secvențe adecvate, pentru a muta poziția de echilibru prin clicuri succesive.
Este astfel posibil să se facă arborele să se rotească în poziția și viteza dorite pur și simplu prin numărarea impulsurilor și setarea frecvenței acestora, deoarece pozițiile de echilibru ale arborelui sunt determinate mecanic cu o precizie extremă.
| Exemplu grafic cu un motor în 100 de trepte | |
|---|---|
 Electromagnetul de sus (1) este energizat, atrăgând cel mai apropiat dinte al unui instrument metalic în formă de rotor. Cu dintele aliniat cu electromagnetul 1, va începe rotația către electromagnetul 2. |  Electromagnetul de sus (1) este oprit și electromagnetul din dreapta (2) este energizat, trăgând următorul dinte ușor spre dreapta. Acest proces produce o rotație de 3,6 ° în acest exemplu. |
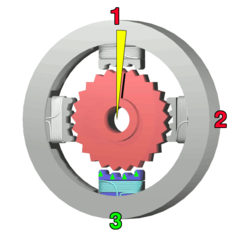 Electromagnetul inferior (3) este excitat; apare o altă rotație de 3,6 °. |  Electromagnetul din stânga (4) este excitat, există o altă rotație de 3,6 °. Când electromagnetul din partea de sus (1) este energizat din nou, dinții pinionului vor trebui să se rotească la următoarea poziție; deoarece există 25 de dinți, este nevoie de 100 de pași pentru a face o rotație completă. |
Construcția electromecanică
Motoarele pas cu pas sunt în mod tradițional împărțite în trei grupe mari: motoare cu magnet permanent , motoare cu reluctanță variabilă și motoare hibride ; acestea din urmă sunt cele mai bune. În realitate, aproape toate cele disponibile astăzi sunt de al treilea tip.

Un motor hibrid constă dintr-un rotor și un stator ; în fotografia laterală există un exemplar nu foarte recent în care structura poate fi văzută clar.
Rotorul apare ca o pereche de roți dințate unul lângă altul și integral cu axul („dinții” se numesc cupe) alcătuite dintr-un miez magnetic (cele două roți sunt magnetizate permanent, una are polaritate nord și cealaltă polaritate sud) și cupe în material feromagnetic . Numărul dinților este variabil, fiind de 50 cel mai frecvent numărul. Dinții celor două roți nu sunt aliniați. Între ele există o defazare exact egală cu 1/2 din pasul dintelui: dintele uneia dintre cele două secțiuni corespunde, așadar, cu valea celeilalte. Nu există fire electrice în rotor și, prin urmare, nu există o conexiune electrică între partea mobilă și partea fixă. În general, rotorul este montat pe rulmenți cu bile , chiar și la modelele economice.
Statorul apare ca setul clasic de înfășurări, iar circuitul magnetic este alcătuit din 4 sau, mai frecvent, 8 „ piese polare ” (opt în cel prezentat în fotografie). În interiorul statorului există dinți mici care se confruntă exact cu cei ai rotorului sau mai bine zis, doar grupul de dinți aparținând unei expansiuni polare și opusului sunt exact orientați spre rotor; celelalte perechi sunt compensate cu 1/4, 1/2 și respectiv 3/4 din pasul dintelui. Înfășurate în jurul polilor magnetici ai statorului sunt firele care, traversate în mod adecvat de curent, generează câmpul magnetic .
Sursele de alimentare ale diferitelor înfășurări sunt evident prezente la exterior; în practică, fazele pot fi încheiate în conformitate cu două scheme:
- Există doar două înfășurări (înfășurate pe mai multe piese polare) și, prin urmare, doar două perechi de fire ajung în exterior: în acest caz vorbim despre motoare bipolare, deoarece curentul va trebui să parcurgă fazele în ambele direcții pentru a crea corespunzătorul câmpuri magnetice.
- Există patru înfășurări înfășurate în perechi, în antiparalel, pe piesele polare; cel puțin cinci fire ajung în exterior (există adesea conexiuni interne la motor între diferitele faze). În acest caz vorbim de motoare unipolare, întrucât curentul într-o singură fază are întotdeauna aceeași direcție. Este posibil să creați două câmpuri magnetice opuse pur și simplu alegând prin care dintre fire să treacă curentul.
Un tip particular de motor pas cu pas poate fi utilizat atât în configurații unipolare, cât și în cele bipolare: acestea sunt cele cu 6 sau 8 fire.
Numărul diferitelor poziții de echilibru prezente într-o rotație completă a arborelui este indicat, în general, ca trepte pe rotație și depinde de numărul de dinți ai rotorului și de polii statorului, nu de numărul de fire ieșite sau de numărul de faze. Numărul de pași pe rotație este adesea tipărit pe container și exprimat în grade.
Unitatea motoarelor pas cu pas
Motoarele pas cu pas sunt acționate de un computer , un PLC , un microcontroler sau un circuit electronic . Conectați substanțial bobinele tranzistorului de putere ale tranzistorului și la ceea ce le comandă. Pentru motoarele unipolare, care au patru bobine A, An, B și Bn, secvența este: A-An-B-Bn (pentru o direcție de rotație) Bn-B-An-A (pentru cealaltă). Curentul trebuie să curgă întotdeauna în bobine în aceeași direcție. Pentru motoarele bipolare, care au două bobine A și B, secvența este ABA * -B * (sau B * -A * -BA pentru direcția opusă de rotație). * Indică faptul că curentul curge în direcția opusă. Motoarele de acest tip se încălzesc foarte mult, deoarece curentul curge chiar și după ce a făcut pasul. Avantajul este acela de a putea menține motorul blocat în poziția dorită.
Aplicații

Aceste caracteristici le fac potrivite pentru utilizare în cititoare de dischete , CD-uri , DVD-uri , în imprimante 3D pentru poziționarea precisă a capetelor de citire / scriere, în imprimante 3D , ac sau inkjet, pentru poziționarea preciziei capetelor de imprimare, precum și în versiunile mai mari pentru modelele de aeronave , modelele de mașini și modelarea navelor .
Motoarele pas cu pas nu sunt potrivite pentru construcția HDD-urilor unde viteza de rotație a discurilor comerciale moderne variază în general între 7200 rpm (discuri de uz general) și 15000 rpm (discuri de întreprindere) și este aproape constantă pe unicul HDD. În HDD-uri, se utilizează deci discuri fără perii, iar capul de citire, care trebuie să efectueze mișcări într-un timp foarte scurt (timp de căutare), este deplasat de un braț electromagnetic fără utilizarea motoarelor.
Alte proiecte
-
 Wikimedia Commons conține imagini sau alte fișiere despre motoare pas cu pas
Wikimedia Commons conține imagini sau alte fișiere despre motoare pas cu pas
linkuri externe
- Motoripassopasso.it de la LAM Technologies
- Motoare pas cu pas Caracteristici, tehnici și circuite de conducere
- Explicație , pe nutchip.com . Adus la 28 februarie 2008 (arhivat din original la 15 februarie 2008) .
- Motoare pas cu pas , pe ms-motor.com . Adus la 12 octombrie 2011 (arhivat din original la 24 martie 2012) .
- Contribuția inițială a acestui articol vine de pe site-ul http://www.vincenzov.net/tutorial/passopasso/stepper.htm , text lansat sub licența GFDL