staticii structurale
Statica a structurilor este parte a mecanicii care se dezvolta studiul static al organismelor care pot fi atribuite forme structurale cunoscute în mecanica structurilor , în special grinzi și structuri . Interesul principal este studiul structurilor izostatice , singurele pentru care, prin condițiile de echilibru static singur, este posibil să se ajungă la o determinare completă a stării lor de stres interne . Astăzi, acest studiu se desfășoară în principal analitic și numeric. În trecut , instrumentele de staticii grafice au fost utilizate pe scară largă, acum amintit , ocazional , și numai în scopuri educaționale.
Condițiile de echilibru ale unei structuri
O structură într-o configurație geometrică atribuită este în echilibru dacă există un astfel de echilibru pentru fiecare dintre piesele în care se pot descompune structura. Prin urmare, problema echilibrului static al unei structuri pot fi urmărite înapoi la problema echilibrului static al tuturor părților sale. În aceste relații de echilibru, nu numai aplicate forțe externe (și cupluri ) intervin, dar și acțiunile (tensiuni interne) că diferitele piese de schimb a reciproc. În scopul evaluării echilibrului, diferitele părți ale structurii pot fi considerate corpuri rigide .
Cardinalul Ecuații staticii
O condiție necesară și suficientă pentru un corp rigid să fie în echilibru este faptul că acestea sunt nule:
- rezultanta forțelor aplicate (translație de echilibru), adică suma forțelor trebuie să fie egal cu 0
- rezultanta momentelor de aplicate forțelor și momentelor (rotație de echilibru), în același mod , de asemenea, suma momentelor trebuie să fie egal cu 0

Pentru un corp în spațiu tridimensional, ecuațiile cardinale ale staticii corespund 6 ecuații scalare (3 la translație și 3 până la rotație). În cazul avionul (traiectoriile puncte ale corpului aparțin unui plan, unde forțele aplicate sunt conținute), statica ecuațiile corespund 3 ecuații scalare (două pentru traducere și una pentru rotație (în jurul unei direcții normale pe planul a problemei)).
Pentru un sistem compus dintr - un număr generic c de părți, deoarece ecuațiile staticii dețin pentru fiecare din părțile sale, numărul total al acestora este de 6 c în cazul tridimensional și 3 c în cazul avionul.
Gradele de libertate
Gradul de libertate este numărul de parametri cinematici necesare pentru a caracteriza mișcarea sau acționează de mișcare a unui sistem. Un corp rigid în spațiu tridimensional are 6 grade de libertate (3 la traducere și 3 până la rotație). În problema plană, corpul rigid are 3 grade de libertate (două la traducere și una de rotație).
Cinematica unui sistem compus din c corpuri rigide este definită de cinematica fiecărui corp din sistem. gradul său de libertate este, prin urmare, suma gradelor de libertate ale părților sale.
Gradul de libertate al unui sistem este egal cu numărul de ecuații scalare necesare pentru a impune echilibru
O constrângere este niciun impediment pentru mobilitatea liberă a organismelor. În Statica structurale, constrângerile avute în vedere sunt:
- holonomists (impune restricții asupra poziției numai organismelor);
- fix (ele sunt independente de timp);
- bilaterali (fiecare componentă cinematic împiedicată este atât în ambele direcții);
- fricțiuni (ele permit pe deplin mișcările ei nu se opun).
Constrângerile se spune a fi extern în cazul în care limitează deplasările absolute, interne în cazul în care limitează deplasările relative între componentele unui sistem. Gradul de constrângere este numărul de componente de deplasare constrânse: în acest sens , vorbim de o constrângere simplă în cazul în care limitează o singură componentă de deplasare, de o constrângere dublă, triplă ... atunci când componentele sunt obstrucționată mai mult de unul.
Noi vorbim de eșec constrângere atunci când constrângerea forțelor de componenta de deplasare constrânsă să -și asume o anumită valoare non-zero.
În mecanica , constrângerile sunt echivalente cu forțe, deoarece acestea modifică mișcarea unui sistem ori de câte ori încearcă să le încalci. O reacție de constrângere este forța exercitată de o constrângere. Pentru condiția constrângere cinematic să fie exercitată, reacțiile de constrângere au o caracterizare foarte precisă ca funcție a componentei de deplasare care trebuie să fie constrânsă: aceasta determină unele caractere vectoriale (direcția și punctul de aplicare) a reacțiilor de constrângere și, prin urmare, numărul de parametri independenți scalare (gradul de constrângere) prin care se exprimă reacția constrângere.
Tipuri de constrângeri


Pentru probleme plane, cele mai frecvent utilizate constrângeri în staticii structurale sunt descrise mai jos.
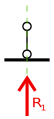
- cărucior sau simplu suport este o constrângere simplă și împiedică mișcarea punctului de-a lungul axei restrîns perpendiculară pe planul de alunecare al căruciorului. Acesta oferă corpul doua libertate de mișcare: translație de-a lungul planului de alunecare a căruciorului și rotirea în jurul punctului constrânsă. Cele corespunde reacției constrângere la o forță aplicată în punctul constrânsă și direcționată de-a lungul direcția perpendiculară pe planul de alunecare.
- balama, este o constrângere dublă care împiedică deplasarea punctului constrânsă de-a lungul oricărei direcții a planului problemei. Lăsați corpul liber să se rotească în jurul punctului în sine. Acesta reacționează cu o forță aplicată punctului și direcționat în funcție de orice direcție care aparține planul problemei: această forță poate fi reprezentată prin două componente ale sale pe două axe ortogonale.
- îmbinarea este o constrângere triplu care impiedica organismul componente de traducere și de rotație. Acesta reacționează prin intermediul a două componente de forță în două direcții diferite și o pereche.
- pendulului sau biela este o constrângere simplă echivalentă transportului: previne deplasarea punctului restrîns de-a lungul axei bielei și permite corpului să se deplaseze perpendicular pe această axă și să se rotească în jurul punctului. Acesta reacționează cu o forță aplicată punctului și direcționat de-a lungul axei bielei.
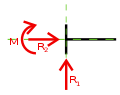
- pendulul dublu sau bipendole este o constrângere dublă traducerea previne de-a lungul axei pendulele și rotația corpului. Acesta permite organismului să traducă de-a lungul direcția perpendiculară pe axa pendulele: în acest sens , constrângerea este , de asemenea , cunoscut sub numele unei sănii sau glif. Acesta reacționează cu o forță directă conform cu axa pendulului și un cuplu.
- dublu pendulul dublu sau pendulul cvadruple sau pendulul necorespunzătoare sau pantograful este o constrângere simplu care rotatii previne corpului. Lăsați corpul liber să traducă. Acesta reacționează printr-un cuplu.

Căruciorul

zip
articulaţia
pendulul

Pendulul dublu

Dublu Pendulul dublu






sisteme de constrânse
Se spune sistem mecanic (o structură), compusă din mai multe corpuri (părțile structurii), supuse constrâns unui sistem de constrângeri cinematic. Gradul de m constrângere a sistemului este suma gradului de constrângerile individuale. Pentru deplasările infinitezimale rigide ale componentelor structurii, prezența constrângerilor cinematice este , în general , exprimată printr - un sistem de m liniar ecuații algebrice în n parametrii cinematici care descriu mobilitatea liberă a unor părți ale structurii (n este gradul de libertate al sistemului)


unde este sunt orice așezări atribuite de constrângeri. Matricea A (MXN) a coeficienților aceasta se numește matricea cinematică a sistemului.


Pentru un sistem restrîns, problema de echilibru se traduce printr - un sistem de n liniar ecuații algebrice în setul de parametri m reprezentative pentru reacțiile de constrângere:


Unde sunt cunoscute termenii ecuațiilor legate de valorile atribuite ale forțelor și momentelor exterioare care acționează asupra sistemului. Matricea B (n x) a coeficienților se numește echilibru matrice sau matrice statică. Se arată că, pentru o alegere adecvată a parametrilor , Matricea de echilibru este egal cu transpusa matricei cinematice



Static și caracterizarea cinematică a sistemelor constrânse



Sistemele mecanice sunt caracterizate static și cinematic pe baza soluțiilor posibile ale sistemelor de ecuații care reprezintă, respectiv, condițiile de echilibru ale sistemului și acțiunea cinematică a constrângerilor

și , prin urmare , pe baza proprietăților algebrice ale celor două matrici A și B ale coeficienților implicați în problemă. Acestea fiind spuse P rangul acestor matrici (rangul două matrici , deoarece unul coincide este transpusa celuilalt), există următoarele tipuri:
- Sistemul izostatică (p = n = m): gradul de constrângere este egal cu gradul de libertate și constrângerile sunt bine plasate, adică independent unul față de celălalt. Problema statică (precum și problema cinematică) admite o soluție și soluția este unică: atunci spunem că sistemul este determinat static (orice valoare a sarcinilor externe este asociată cu reacții de constrângere care fac sistemul echilibrat) și cinematic determinat ( constrângerile sunt strict suficiente pentru a preveni actele de mișcare rigidă a părților sale, sau pentru a le determina univoc în cazul randamentelor atribuite).
- Sistemul labil (p = m <n): gradul de constrângere este mai mic decât gradul de libertate al sistemului și constrângerile actuale sunt bine reprezentate. În ceea ce privește cinematice, problema legate admite soluții: constrângerile aplicate sunt insuficiente pentru a preveni actele de mișcare rigidă a sistemului, capabile să articuleze conform cu l = mecanismele labilitate nm (sistemul este cinematic nedeterminat și l = nm este gradul de labilitate). Din punct de vedere static, problema legate admite, în general, nici o soluție. Două situații sunt posibile, care depind de rangul p "matricei obținută prin Hemming matricea statică cu vectorul termeni cunoscuți. Dacă p „> p sistemul este imposibil static. Dacă p „= p sistemul (deși cinematic labil) este determinată static. Prin urmare, Clasificarea statică depinde de sistemul de încărcare prezent.
- Sistemul nedeterminate (p = n <m): gradul de constrângere este mai mare decât gradul de libertate. Din punct de vedere static, a admite problema legata soluții: sistemul este întotdeauna în echilibru , dar condițiile de echilibru sunt în număr suficient pentru a determina univoc valorile reacțiilor de constrângere (sistemul este static nedeterminat și i = mn este gradul de hyperstaticity). În termeni cinematice, problema relativă nu admite, în general, o soluție pentru valorile generice ale așezărilor: constrângerile sunt supraabundentă și acțiunile de mișcare ale sistemului sunt întotdeauna prevenite.
- Sistemul degenerate (p <min {n, m}): constrângerile prezente sunt deplasate și insuficiente pentru a preveni acțiunile de mișcare a sistemului (sistemul are mecanisme np de labilitate). Există Echilibrul numai pentru valori particulare ale sarcinilor (p „= p), dar numărul p de ecuații independente de echilibru nu este suficientă pentru a determina univoc valorile reacțiilor de constrângere (sistemul are hyperstaticity mp). În practică, un sistem degenerate prezintă la aceleași mecanisme timp de labilitate și condițiile de hyperstaticity.


Structuri izostatice, nedeterminate și labili
Pentru o structură generică, relația dintre gradul de libertate, constrângere, slăbiciune și hyperstaticity este întotdeauna verificată

Din aceasta deducem următoarele condiții suficiente pentru slăbiciunea și hyperstaticity unei structuri:
- structura este cu siguranță labil;
- structura este cu siguranță nedeterminate.


Cu toate acestea, cele două condiții nu sunt necesare pentru labilitate și hyperstaticity: un sistem degenerat prezintă atât hyperstaticity și labilitatea, în ciuda faptului că .

Pe de altă parte, egalitatea între gradul de libertate și gradul de constrângere este o condiție suficientă necesară, dar nu și pentru isostaticity:
- structura este izostatică.

De fapt, constrângerile pot fi deplasate, iar structura va fi degenerate de fapt. În concluzie, o structură este izostatică în cazul în care există egalitate între gradul de constrângere și de gradul de libertate și în cazul în care se demonstrează că constrângerile sunt eficiente, care este, în cazul în care se demonstrează că nu există mecanisme labilitate ale structurii.
Structuri izostatice joaca un rol prevalentă în staticii structurale, deoarece acestea sunt în mod univoc rezolvabile (în ceea ce privește reacțiile de constrângere și a tensiunilor interne) folosind doar echilibru static condiții.
Pentru structurile nedeterminate, statica ecuațiile nu sunt suficiente pentru rezolvarea acestora: în acest caz, este necesar să se facă referire la forța metoda sau metoda de rigiditate .
În general, structurile labile sunt static nerezolvat.
Caracteristicile de stres

Un corp (un fascicul), în echilibru, sub acțiunea unui sistem de forțe externe pot fi considerate întotdeauna ca fiind compusă din două părți definite de un plan de secționare. Constrângerea continuitate acționează în corespondență cu secțiunea solicitând celor două părți să rămână de împerechere în timpul mișcării corpului. Această constrângere continuitate este exprimat pe secțiunea prin intermediul unui sistem punctual de tensiuni ( tensiuni interne ) că cele două părți ale corpului face schimb reciproc prin cele două fețe ale secțiunii.
Forțele de contact pe care o parte din corp exercită pe de altă parte interveni, împreună cu forțele exterioare aplicate, în condițiile de echilibru care trebuie să continue să se aplice fiecăreia dintre cele două părți ale corpului. Prin urmare, rezultanta și momentul rezultanta forțelor de contact interne pot fi determinate pe baza ecuațiilor cardinale ale statica uneia dintre cele două părți ale corpului, echilibrarea rezultanta și momentul rezultant al forțelor exterioare aplicate în acestea.
Caracteristicile de stres ale unei secțiuni sunt definite ca componentele vectorilor rezultați și momentul rezultanta forțelor de contact interne ale secțiunii, într - un local de referință integral cu planul secțiunii. Pentru o problemă de plat acestea sunt:
- stres normal (N) (componenta rezultanta forțelor de contact în direcția perpendiculară pe fața secțiunii)
- tensiune de forfecare (T) (componenta rezultanta forțelor de contact în direcția paralelă cu fața secțiunii)
- momentul (M) de îndoire (component al momentului rezultat în direcția normală la planul problemei)
Caracteristicile de stres variază în secțiunea variază. O reprezentare sintetică a acestora pot fi obținute prin intermediul unor diagrame. În structurile plane, obiectivul principal al staticii structurale este reconstrucția tensiunii normale, tensiunea de forfecare și îndoire diagrame de moment.
Bibliografie
- Belluzzi Odone, Stiinta constructii (1 volum), Zanichelli, Bologna, 1953 și edițiile ulterioare
- Giulio Ceradini. Construirea științei. 1: Cinematica și staticii sistemelor rigide. ESA, Roma, 1985. ISBN 88-405-3017-7 .
- Elisa Guagenti Grandori și colab. Static. McGraw-Hill, Milano, 1995. ISBN 88-386-0657-9 .
- Antonio Domenico Lanzo. Elastice grinzi de analiză: metode și aplicații. Aracne, Roma, 2007. ISBN 978-88-548-1162-1 .