Legile lui Kepler care descriu proprietățile orbitelor obiectelor supuse forței gravitaționale generate de un corp masiv pot fi deduse teoretic prin aplicarea principiilor dinamicii (ecuațiile lui Newton).
În procedura de mai sus, va fi demonstrată inițial existența unei prime integrale a mișcării , viteza areolară (a doua lege a lui Kepler ); ulterior vom demonstra că traiectoriile în spațiul de coordonate ale sistemului sunt eliptice (prima lege) și în cele din urmă vom găsi dependența perioadei orbitei de lungimea axei semi-majore a elipsei (a treia lege).
Derivare
Pentru derivarea legilor lui Kepler pornind de la ecuațiile newtoniene și legea gravitației universale, este mai întâi necesar să se introducă o aproximare.
Ne vom limita la cazul în care masa planetei este neglijabilă în comparație cu cea a Soarelui; în acest caz putem fixa centrul sistemului de referință în centrul Soarelui și neglijăm mișcarea acestuia.
În această aproximare, problema lui Kepler este redusă la cea a unei mișcări într-un câmp central în care se menține ecuația lui Newton
{\ displaystyle m {\ ddot {r}} = - {\ frac {\ partial V} {\ partial r}}} 
unde este {\ displaystyle V (r) = - k / r} 
Această relație se obține tocmai prin integrarea su {\ displaystyle r}  expresia forței gravitaționale{\ displaystyle F (r) = - k / r ^ {2}}
expresia forței gravitaționale{\ displaystyle F (r) = - k / r ^ {2}}  .
.
A doua lege: de la conservarea impulsului unghiular la cea a vitezei areolare
A doua lege a lui Kepler afirmă că viteza areolară este constantă în timpul mișcării.
Acum, introducerea unui sistem de coordonate polare {\ displaystyle (r, \ theta)}  , cu versorii lor respectivi
, cu versorii lor respectivi
- {\ displaystyle (\ mathbf {\ hat {r}}, \ mathbf {\ hat {\ theta}})}
 unul are, banal {\ displaystyle \ mathbf {r} = r \ mathbf {\ hat {r}}}
unul are, banal {\ displaystyle \ mathbf {r} = r \ mathbf {\ hat {r}}}  .
.
Prin derivarea acestei cantități în funcție de timp, obținem (aplicând regula derivării produsului și ne amintim
- {\ displaystyle \ mathbf {\ dot {\ hat {r}}} = {\ dot {\ theta}} \ mathbf {\ hat {\ theta}}}
 , {\ displaystyle \ mathbf {\ dot {\ hat {\ theta}}} = - {\ dot {\ theta}} \ mathbf {\ hat {r}}}
, {\ displaystyle \ mathbf {\ dot {\ hat {\ theta}}} = - {\ dot {\ theta}} \ mathbf {\ hat {r}}} 
- {\ displaystyle \ mathbf {\ dot {r}} = {\ dot {r}} \ mathbf {\ hat {r}} + r {\ dot {\ theta}} \ mathbf {\ hat {\ theta}}}

Acum, luând în considerare pentru simplitate masa unitară, impulsul unghiular {\ displaystyle \ mathbf {L}}  este valid (exploatând proprietățile produsului vector ):
este valid (exploatând proprietățile produsului vector ):
- {\ displaystyle \ mathbf {L} = \ mathbf {r} \ times \ mathbf {\ dot {r}} = \ mathbf {r} \ times {\ dot {r}} \ mathbf {\ hat {r}} + \ mathbf {r} \ times r {\ dot {\ theta}} \ mathbf {\ hat {\ theta}} = r {\ dot {\ theta}} (\ mathbf {r} \ times \ mathbf {\ hat { \ theta}}) = r ^ {2} {\ dot {\ theta}} (\ mathbf {\ hat {r}} \ times \ mathbf {\ hat {\ theta}}) = r ^ {2} {\ punct {\ theta}}}

Direcționat ortogonal spre planul în care are loc mișcarea.
Prin legea conservării impulsului unghiular, rezultă acea cantitate {\ displaystyle r ^ {2} {\ dot {\ theta}}}  este o integrală a mișcării.
este o integrală a mișcării.
Având în vedere viteza areolară {\ displaystyle C}  ca derivată în timp a zonei măturate de raza vectorială , avem
ca derivată în timp a zonei măturate de raza vectorială , avem
- {\ displaystyle \ mathrm {d} S = {\ frac {1} {2}} r ^ {2} {\ dot {\ theta}} \ mathrm {d} t}

Într-adevăr, având în vedere un colț {\ displaystyle \ mathrm {d} \ theta = {\ dot {\ theta}} \ mathrm {d} t}  , aria măturată în intervalul de timp infinitesimal, elementul de zonă este dat de jumătatea pătratului de {\ displaystyle r} pentru colțul din centru.
, aria măturată în intervalul de timp infinitesimal, elementul de zonă este dat de jumătatea pătratului de {\ displaystyle r} pentru colțul din centru.
Executarea derivatului:
- {\ displaystyle C = {\ frac {\ mathrm {d} S} {\ mathrm {d} t}} = {\ frac {1} {2}} r ^ {2} {\ dot {\ theta}} = {\ frac {1} {2}} L}
 .
.
Prin urmare, viteza areolară este o integrantă a mișcării. [1]
Se poate observa că validitatea celei de-a doua legi este complet independentă de expresia potențialului considerat, de fapt este o proprietate a tuturor potențialelor centrale.
Prima lege: traiectoria eliptică a planetelor
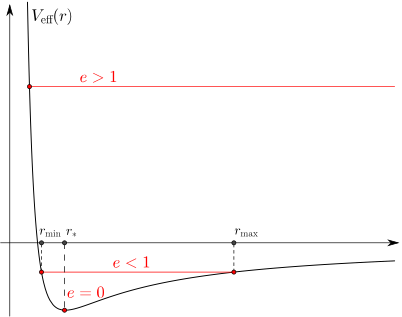
Grafic al potențialului Keplerian efectiv în funcție de rază. Pentru valori de excentricitate mai mici decât unul, potențialul are două puncte de inversiune la valori
{\ displaystyle r _ {\ text {min}}} 
Și
{\ displaystyle r _ {\ text {max}}} 
. Prin urmare, orbita din spațiul de coordonate este limitată la coroana circulară delimitată de circumferințele acestor raze. În special, traiectoria este tangentă la fiecare circumferință în puncte îndepărtate una de cealaltă
{\ displaystyle \ pi} 
: sunt deci elipse. Pentru
{\ displaystyle r = r _ {*}} 
, la minimul potențialului, excentricitatea este zero, în spațiul de fază orbita este redusă la punctul eliptic și traiectoria corpului este circulară.
În primul rând, problema bidimensională a mișcării în câmpul central poate fi ușor redusă la un caz unidimensional utilizând definiția potențialului efectiv .
Ecuațiile mișcării, de fapt, pot fi rescrise luând în considerare forma
{\ displaystyle V _ {\ text {eff}} = {\ frac {L ^ {2}} {2r ^ {2}}} + V (r) = {\ frac {L ^ {2}} {2r ^ {2}}} - {\ frac {k} {r}}} 
Într-o mișcare centrală a câmpului, relația dintre unghi {\ displaystyle \ theta}  și distanța față de origine {\ displaystyle r} este dat de integral
și distanța față de origine {\ displaystyle r} este dat de integral
{\ displaystyle \ theta = \ int {\ frac {L / r ^ {2} \, \ mathrm {d} r} {\ sqrt {2 (E-V _ {\ text {eff}} (r))}}} = \ int {\ frac {L / r ^ {2} \, \ mathrm {d} r} {\ sqrt {2 (EV _ {\ text {eff}} (r))}}} = \ arccos {\ frac {L / rk / L} {\ sqrt {(2E + k ^ {2} / L ^ {2})}}} 
unde constanta integrativă a fost setată egală cu zero. Aceasta înseamnă că integralul este calculat din pericentrul orbitei.
Acum definim cantitățile
{\ displaystyle p = L ^ {2} / k, \ qquad e = {\ sqrt {1 + 2EL ^ {2} / k ^ {2}}}} 
și inversarea adecvată a expresiei {\ displaystyle \ theta} ajungem la ecuație
{\ displaystyle r = {\ frac {p} {1 + e \ cos \ theta}}}  .
.
Aceasta nu este altceva decât expresia oricărei conici în coordonate polare centrate într-un focar.
De sine {\ displaystyle e <1,}  aceasta reprezintă o elipsă cu excentricitate {\ displaystyle e}
aceasta reprezintă o elipsă cu excentricitate {\ displaystyle e}  și semi-drepte {\ displaystyle p}
și semi-drepte {\ displaystyle p}  .
.
În special, este posibil să se obțină valorile arborilor de acționare {\ displaystyle a}  Și {\ displaystyle b}
Și {\ displaystyle b}  :
:
{\ displaystyle a = {\ frac {p} {1-e ^ {2}}} = {\ frac {L ^ {2} / k} {1-1-2EL ^ {2} / k ^ {2} }} = {\ frac {k} {2 | E |}}} 
{\ displaystyle b = {\ frac {p} {\ sqrt {1-e ^ {2}}}} = {\ frac {L ^ {2} / k} {\ sqrt {1-1-2EL ^ {2 } / k ^ {2}}}} = {\ frac {L} {\ sqrt {2 | E |}}}} 
A treia lege: dependența perioadei-semiaxa majoră
În expresiile lui {\ displaystyle a} Și {\ displaystyle b} abia obținut, poate fi văzut ca axa semi-majoră {\ displaystyle a} este dependentă doar de energia totală a sistemului, în timp ce axa semi-minoră este, de asemenea, o funcție a impulsului unghiular. Întrucât perioada de rotație, în mișcarea din câmpul central, este doar o funcție a energiei, acest fapt ne permite să deducem pentru perioadă o relație doar referitoare la axa semi-majoră a elipsei.
În special, vom avea (fiind {\ displaystyle \ pi ab}  zona elipsei e {\ displaystyle C} viteza areolară, a cărei valoare este constantă și egală cu {\ displaystyle L / 2}
zona elipsei e {\ displaystyle C} viteza areolară, a cărei valoare este constantă și egală cu {\ displaystyle L / 2}  ).
).
{\ displaystyle T (E) = {\ frac {\ pi ab} {C}} = \ pi {\ frac {k} {2 | E |}} {\ frac {L} {\ sqrt {2 | E | }}} {\ frac {2} {L}} = \ pi k {\ frac {\ sqrt {2}} {2}} | E | ^ {- 3/2}} 
Acum, recuperând expresia {\ displaystyle a} ca o funcție a energiei pe care o avem {\ displaystyle | E | = {\ frac {k} {2a}}}  , prin substituirea acestei valori în ecuația anterioară pe care o obținem
, prin substituirea acestei valori în ecuația anterioară pe care o obținem
{\ displaystyle T (E) = \ pi k {\ frac {\ sqrt {2}} {2}} \ left ({\ frac {2a} {k}} \ right) ^ {3/2}} 
din care se deduce că {\ displaystyle T ^ {2} \ propto a ^ {3}}  precum afirmă a treia lege a lui Kepler. [1]
precum afirmă a treia lege a lui Kepler. [1]
Notă
- ^ a b Vladimir Igorevič Arnold , Metode matematice ale mecanicii clasice , Roma, Editori Riuniti University Press, 2010, pp. 36-44.
