Criteriul Nyquist


În teoria sistemelor, criteriul stabilității Nyquist este o tehnică grafică care determină stabilitatea asimptotică a unui sistem de feedback dinamic . A fost formulată în 1932 de Harry Nyquist . [1] Criteriul Nyquist este utilizat pe scară largă pentru proiectarea și analiza sistemelor de feedback în electronică și ingineria automatizării , precum și în alte domenii.
Deoarece se bazează exclusiv pe diagrama Nyquist a sistemelor cu buclă deschisă, poate fi aplicată fără a fi nevoie să calculeze în mod explicit polii și zerourile sistemului cu buclă închisă sau cu buclă deschisă (cu toate acestea, este necesar să se cunoască numărul de poli și zerouri în jumătatea planului drept). În consecință, poate fi aplicat sistemelor definite de funcții non-raționale, cum ar fi sistemele cu întârzieri. Spre deosebire de diagramele Bode, poate lua în considerare sistemele descrise prin funcții de transfer cu singularitate în jumătatea planului drept (cu partea reală pozitivă). În plus, poate generaliza cu ușurință sistemele cu intrări multiple și ieșiri multiple, cum ar fi un sistem de control al aeronavei.
Deși este unul dintre cele mai generale criterii, este totuși limitat la sisteme liniare invariante în timp (LTI, numite și sisteme dinamice staționare liniare).
Diagrama Nyquist
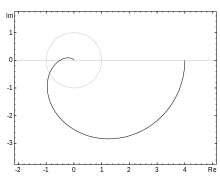
Cu diagrama Nyquist ne referim la o reprezentare grafică particulară a funcției de transfer a unui sistem liniar staționar dinamic . Este un grafic util în analiza sistemelor de control al feedback-ului , în special în legătură cu verificarea stabilității .
Reprezentarea are loc pe un grafic în coordonate polare în care partea imaginară (pe axa y ) și partea reală (pe axa x ) a funcției de transfer sunt trasate pe măsură ce variază pulsul sau frecvența unghiulară ω. Această diagramă utilizează un singur plan de referință, spre deosebire de diagrama Bode care reprezintă modulul și faza în funcție de ω în două planuri carteziene distincte.
Stabilitatea unui sistem de buclă închisă cu feedback negativ este determinată prin aplicarea criteriului Nyquist la diagrama Nyquist a sistemului de buclă deschisă (adică sistemul fără ramura de feedback). Această metodă este, de asemenea, ușor de aplicat pentru sistemele cu întârzieri fracționale nerationale sau funcții de transfer, care pot fi dificil de analizat cu alte metode. Stabilitatea este determinată de numărul de rotații ale diagramei în jurul punctului din planul complex (−1,0). Gama de câștiguri cu care sistemul rămâne stabil poate fi determinată prin examinarea intersecțiilor cu axa reală.
Diagrama Nyquist poate oferi câteva informații cu privire la forma funcției de transfer. De exemplu, oferă informații despre diferența dintre numărul de zerouri și poli ai funcției de transfer [2] din unghiul la care curba se apropie de origine.
Context
Să luăm în considerare un sistem cu o funcție de transfer în buclă deschisă (FTAA, sau OLTF în engleză) ; când se introduce o buclă închisă cu feedback negativ , funcția de transfer în buclă închisă (FTAC sau CLTF în engleză) devine .



Stabilitatea poate fi determinată prin examinarea rădăcinilor polinomului , de exemplu folosind criteriul Routh-Hurwitz , dar această metodă este laborioasă. Putem încheia examinând FTAA, cu diagramele Bode sau, în acest caz, diagrama polară a FTAA cu criteriul Nyquist, după cum urmează.


Orice funcție de transfer pe domeniul Laplace este o funcție rațională divizată:


Rădăcinile sunt zerourile din , și rădăcinile sunt polii din . Polii din sunt, de asemenea, rădăcinile „ecuației caracteristice” .



Stabilitatea este determinată de valorile polilor săi: pentru a avea stabilitate, partea reală a tuturor polilor trebuie să fie negativă. De sine se formează prin închiderea unei bucle de feedback negativ în jurul funcției de transfer a buclei deschise

atunci rădăcinile ecuației caracteristice sunt și zerourile lui , sau pur și simplu rădăcinile .


Criteriul
Mai întâi construim calea Nyquist , care cuprinde jumătatea dreaptă a planului (RHP):
- o cale pe axă , din la .
- un arc de semicerc cu rază , care începe la și rulează în sensul acelor de ceasornic până la .






Calea (sau conturul) lui Nyquist mapată pe funcție dă un grafic de în planul complex. Pentru principiul argumentului, numărul de ocoliri orare ale originii trebuie să fie egal cu numărul de zerouri ale în jumătatea planului complex drept minus numărul de poli ai în aceeași jumătate a podelei. Dacă, în schimb, schița este mapată pe ALCA , rezultatul este diagrama lui . Prin numărarea rundelor de -1 a limitei rezultate, găsim diferența dintre numărul de zerouri și numărul de poli din jumătatea planului drept complex al . Amintindu-mi că zerourile din sunt polii sistemului buclă închisă, și observând că polii de sunt egali cu polii din , putem afirma criteriul Nyquist :

Având o cale Nyquist , este numărul de poli ai închis de , și așa să fie numărul de zerouri ale închis de . Alternativ, și mai presus de toate, dacă este numărul de zerouri ale sistemului cu buclă închisă în jumătatea planului drept și este numărul de poli din jumătatea planului drept al funcției de buclă deschisă , calatoria consecutiva in plan- , se va roti în sensul acelor de ceasornic în jurul punctului ori atât de mari încât .







Dacă sistemul buclă deschisă este instabil inițial, este necesar feedback pentru a stabiliza sistemul. Polii jumătății planului drept reprezintă această instabilitate. Pentru stabilitatea în buclă închisă a unui sistem, numărul rădăcinilor în buclă închisă din jumătatea dreaptă a planului s (adică cu o parte reală și imaginară a lui s pe axe) trebuie să fie zero. Prin urmare, numărul de rotații în sens invers acelor de ceasornic trebuie să fie egal cu numărul de poli cu buclă deschisă din RHP. Un număr diferit de ture în sensul acelor de ceasornic în jurul acelor de ceasornic indică faptul că sistemul ar fi instabil dacă inelul ar fi închis. Utilizarea zerourilor RHP pentru a elimina polii RHP nu elimină instabilitatea, ci se asigură mai degrabă că sistemul rămâne instabil chiar și în prezența feedback-ului, deoarece rădăcinile în buclă închisă rulează între poli și zero-urile în buclă deschisă în prezență. părere. De fapt, zerourile RHP pot face ca polul instabil să nu fie observabil și, prin urmare, să nu fie stabilizabil cu feedback-ul.

Notă
- ^ (EN) Harry Nyquist, Teoria regenerării , în Jurnalul tehnic al sistemului Bell, vol. 11, n. 1, 1932, pp. 126–147, DOI : 10.1002 / j.1538-7305.1932.tb02344.x . Adus pe 14 iunie 2019 .
- ^ Nyquist Plots , facstaff.bucknell.edu , 30 septembrie 2008. Accesat la 28 iunie 2019 (arhivat din original la 30 septembrie 2008) .
Bibliografie
- ( EN ) Gene Franklin, Feedback Control of Dynamic Systems , Prentice Hall, 2002, ISBN 0-13-032393-4 .