Formarea roiului

Formarea sau de a roi roiul , este un comportament colectiv prezentat de entități, în special animale, de dimensiuni similare care se strâng împreună, se mișcă sau aproximativ în același punct sau în vrac sau migrează într-o direcție. Este un subiect extrem de interdisciplinar. [1] Termenul roire sau roire se aplică în special insectelor, dar poate fi aplicat și oricărei alte entități sau animale care prezintă un comportament similar. Termenul flocking sau murmur poate fi specific păsărilor care roiesc, pentru a se aduna în turme în raport cu roiul în tetrapode și agregarea în ghișee pentru a indica peștii roiți. Fitoplanctonul se adună și în roiuri uriașe numite flori , deși aceste organisme sunt alge și nu sunt autopropulsate ca animalele. Prin extensie, termenul „roi” se aplică și entităților neînsuflețite care prezintă comportamente paralele, cum ar fi într-un roi de roboți , un roi de cutremur sau un roi de stele.
Din punct de vedere mai abstract, formarea roiului este mișcarea colectivă a unui număr mare de entități autopropulsate . [2] Din punctul de vedere al celor care creează modele matematice, este un comportament emergent derivat din reguli simple care sunt urmate de indivizi și nu implică nicio coordonare centrală. Formarea roiului este, de asemenea, studiată de către fizicienii materiei active ca fenomen care nu se află în echilibru termodinamic și, ca atare, necesită dezvoltarea unor instrumente suplimentare față de cele disponibile din fizica statistică a sistemelor în echilibru termodinamic.
Formarea roiului a fost simulată pentru prima dată pe un computer în 1986, cu software-ul de simulare a barelor . [3] Acest software simulează agenți simpli (pachete) care se pot deplasa conform unui set de reguli de bază. Modelul a fost inițial conceput pentru a imita comportamentul turmei de păsări, dar poate fi aplicat și turmelor de pești și alte entități de roire.
Modele
În ultimele decenii, oamenii de știință au început să modeleze formarea roiurilor pentru a dobândi o înțelegere mai profundă a comportamentului.
Modele matematice
Studiile timpurii despre formarea roiurilor au folosit modele matematice pentru a simula și a înțelege comportamentul. Cele mai simple modele matematice de agregări animale reprezintă de obicei animale individuale urmând aceste trei reguli:
- Se mișcă în aceeași direcție ca vecinii lor
- Ei rămân aproape de vecinii lor
- Evită confruntările cu vecinii lor
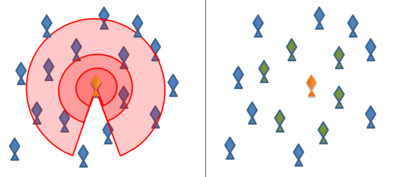
Programul de computer Boids , creat de Craig Reynolds în 1986, simulează formarea roiului urmând regulile de mai sus. [3] Multe modele actuale și ulterioare folosesc unele variații ale acestor reguli, adesea implementându-le prin intermediul „zonelor” concentrice din jurul fiecărui animal. În „zona de respingere”, foarte aproape de animal, animalul focal va încerca să se distanțeze de vecinii săi pentru a evita o coliziune. Puțin mai departe, în „zona de aliniere”, animalul focal va încerca să-și alinieze direcția de mișcare cu cea a vecinilor săi. În „zona de atracție” exterioară, care se întinde de la animalul focal pe cât poate simți, animalul focal va încerca să se deplaseze spre un animal din apropiere.
Forma acestor zone va fi în mod necesar influențată de abilitățile senzoriale ale unui anumit animal. De exemplu, câmpul vizual al unei păsări nu se extinde în spatele corpului său. Peștii se bazează atât pe percepția vizuală, cât și pe percepțiile hidrodinamice transmise prin marginile lor, în timp ce krilul din Antarctica se bazează atât pe viziune, cât și pe semnalele hidrodinamice transmise prin antene .
Cu toate acestea, studii recente asupra turmelor de grauri au arătat că fiecare pasăre își schimbă poziția, față de cele șase sau șapte animale care o înconjoară, indiferent cât de aproape sau de departe sunt aceste animale. [4] Interacțiunile dintre grauri care se mișcă în turme se bazează, așadar, pe o regulă topologică , mai degrabă decât pe una metrică. Rămâne de văzut dacă acest lucru se aplică și altor animale. Un alt studiu recent, bazat pe o analiză a împușcării de mare viteză a turmelor peste Roma și a ipotezării unor reguli comportamentale minime, a simulat în mod convingător o serie de aspecte ale comportamentului turmei. [5] [6] [7] [8]
Modele evolutive
Pentru a înțelege mai bine de ce animalele dezvoltă comportamente de roire, oamenii de știință au apelat la modele evolutive care simulează populațiile de animale în evoluție. De obicei, aceste studii utilizează un algoritm genetic pentru a simula evoluția de-a lungul mai multor generații. Aceste studii au examinat o serie de ipoteze care încearcă să explice de ce animalele dezvoltă comportamente de roire, cum ar fi teoria turmei egoiste , [9] [10] [11] [12] efectul confuz al prădătorilor, [13] [14] diluarea efect, [15] [16] și teoria ochilor multipli. [17]
Agenți
- ( EN ) Robert Mach și Frank Schweitzer, Multi-Agent Model of Biological Swarming , în Advances In Artificial Life , Lecture Notes in Computer Science , vol. 2801, 2003, pp. 810-820, DOI : 10.1007 / 978-3-540-39432-7_87 , ISBN 978-3-540-20057-4 .
Autoorganizarea

Comportament emergent
Conceptul de comportament emergent - ale cărui proprietăți și funcții găsite la nivel ierarhic nu sunt prezente și sunt irelevante la nivelurile inferioare - este adesea un principiu de bază în spatele sistemelor de auto-organizare . [18] Un exemplu de autoorganizare în biologie care duce la apariția în lumea naturală se găsește în coloniile de furnici. Regina nu dă ordine directe și nu le spune furnicilor ce să facă. [ citație necesară ] În schimb, fiecare furnică reacționează la stimuli sub formă de mirosuri chimice din larve, alte furnici, intruși, acumulări de alimente și deșeuri și lasă în urmă o urmă de chimie care, la rândul său, oferă un stimul pentru celelalte furnici. Aici fiecare furnică este o unitate autonomă care reacționează numai pe baza mediului său local și a regulilor codificate genetic pentru varietatea sa. În ciuda lipsei de luare a deciziilor centralizate, coloniile de furnici prezintă comportamente complexe și au putut chiar să demonstreze capacitatea de a rezolva probleme geometrice. De exemplu, coloniile găsesc de obicei cea mai mare distanță de toate intrările coloniilor pentru a elimina cadavrele.
Stigmergy
Un alt concept cheie în domeniul inteligenței roiului este stigmeria . [19] [20] Stigmeria este un mecanism indirect de coordonare între agenți sau acțiuni. Principiul este că urma lăsată în mediu de o acțiune stimulează efectuarea unei acțiuni ulterioare, de către același agent sau de către un agent diferit. În acest fel, acțiunile ulterioare tind să se întărească reciproc, ducând la nașterea spontană a unor activități coerente, aparent sistematice. Stigmeria este o formă de autoorganizare. Produce structuri complexe, aparent inteligente, fără a fi nevoie de planificare, control sau comunicare directă între agenți. Ca atare, susține o colaborare eficientă între agenți extrem de simpli, cărora le lipsește memoria, inteligența sau chiar conștientizarea reciprocă. [20]
Inteligența roiului
Inteligența roiului este comportamentul colectiv al sistemelor descentralizate , autoorganizate , naturale sau artificiale. Conceptul este utilizat în lucrarea privind inteligența artificială . Expresia a fost introdusă de Gerardo Beni și Jing Wang în 1989, în contextul sistemelor robotizate celulare . [21]
Sistemele de informații despre roiuri sunt formate în mod obișnuit dintr-o populație de agenți simpli , cum ar fi buzele care interacționează local între ele și mediul lor. Agenții respectă reguli foarte simple și, deși nu există o structură de control centralizată care să dicteze modul în care agenții individuali ar trebui să se comporte, la nivel local și într-o oarecare măsură aleatoriu, interacțiunile dintre acești agenți conduc la apariția unui comportament inteligent global., Necunoscut agenților individuali.
Cercetarea informațiilor despre roiuri este multidisciplinară. Poate fi împărțit în cercetarea roiului natural care studiază sistemele biologice și cercetarea roiului artificial care studiază artefactele umane. Există, de asemenea, un flux științific care încearcă să modeleze aceleași sisteme de roi și să înțeleagă mecanismele care stau la baza lor, și un flux de inginerie axat pe aplicarea unor perspective dezvoltate de fluxul științific actual pentru a rezolva problemele practice din alte domenii. [22]
Algoritmi
Algoritmii de roi urmează fie o abordare lagrangiană, fie o abordare euleriană . [23] Abordarea euleriană identifică roiul ca un câmp , care funcționează cu densitatea roiului și derivă proprietăți ale câmpului mediu. Este o abordare hidrodinamică și poate fi utilă pentru modelarea dinamicii generale a roiurilor mari. [24] [25] [26] Cu toate acestea, majoritatea modelelor funcționează cu abordarea lagrangiană, care este un model bazat pe agenți care urmărește agenții individuali (puncte sau particule) care alcătuiesc roiul. Modelele individuale de particule pot urmări informațiile de direcție și distanțare care se pierd în abordarea euleriană. [23] [27]
Optimizarea coloniilor de furnici
Optimizarea coloniei de furnici este un algoritm utilizat pe scară largă, care a fost inspirat de comportamentele furnicilor și a fost eficient în rezolvarea problemelor de optimizare discretă legate de roi. [28] Algoritmul a fost propus pentru prima dată de Marco Dorigo în 1992, [29] [30] și de atunci a fost diversificat pentru a rezolva o clasă mai largă de probleme numerice. Speciile care au mai multe regine pot avea o regină care părăsește cuibul împreună cu unii muncitori pentru a întemeia o colonie pe un nou sit, un proces similar cu roiul de albine . [31] [32]
- Furnicile sunt practic nesofisticate; colectiv îndeplinesc sarcini complexe. Au o comunicare sofisticată, foarte dezvoltată, bazată pe semne.
- Furnicile comunică folosind feromoni; sunt lansate piese care pot fi urmate de alte furnici.
- Furnicile care au probleme de direcție eliberează feromoni diferiți utilizați pentru a calcula calea „cea mai scurtă” de la punctul de origine la destinație (destinații).
- ( EN ) EM Rauch, MM Millonas și DR Chialvo, Formarea modelului și funcționalitatea în modele de roi , în Physics Letters A , vol. 207, nr. 3-4, 1995, p. 185, Bibcode : 1995PhLA..207..185R , DOI : 10.1016 / 0375-9601 (95) 00624-c , arXiv : adap-org / 9507003 .
Particule autopropulsate
Conceptul de particule autopropulsate ( SPP ) a fost introdus în 1995 de Tamás Vicsek și colab. [33] ca un caz special al modelului boids introdus în 1986 de Reynolds. [3] Un roi de SPP este modelat de o colecție de particule care se mișcă cu o viteză constantă și răspund la perturbații aleatorii, adoptând de fiecare dată o creștere a direcției medii de mișcare a celorlalte particule apropiate de zona lor. [34]
Simulările arată că o „regulă a celui mai apropiat vecin” are ca rezultat în cele din urmă toate particulele care roiesc împreună sau se deplasează în aceeași direcție. Acest lucru este evident, chiar dacă nu există o coordonare centralizată și chiar dacă particulele adiacente fiecărei particule se schimbă constant în timp. [33] Modelele SPP prezic că animalele roitoare împărtășesc anumite proprietăți la nivel de grup, indiferent de tipul de animale din roi. [35] Sistemele de roire dau naștere la comportamente emergente care apar la scări foarte diferite, dintre care unele sunt atât universale, cât și robuste. Pentru fizicienii teoretici a devenit dificil să găsească modele statistice minime care să surprindă aceste comportamente. [36] [37]
Optimizare cu roiuri de particule
Optimizarea dușului cu particule este un alt algoritm utilizat pe scară largă pentru rezolvarea problemelor de duș. A fost dezvoltat în 1995 de Kennedy și Eberhart și a avut inițial scopul de a simula comportamentul social și coregrafia turmelor de păsări și a școlilor de pești. [38] [39] Algoritmul a fost simplificat și s-a observat că realizează optimizare. Sistemul generează inițial o populație cu soluții aleatorii. Apoi caută spațiul problematic prin generații succesive folosind optimizarea stocastică pentru a găsi cele mai bune soluții. Soluțiile pe care le găsește se numesc puncte materiale sau particule. Fiecare particulă își memorează poziția și cea mai bună soluție la care a ajuns până acum. Optimizatorul de roi de particule urmărește cea mai bună valoare locală obținută în acel moment de orice particulă din cartierul local. Particulele rămase se deplasează apoi prin spațiul problemei, urmând particula de ghidare a particulelor optime. La fiecare iterație, optimizatorul roiului de particule accelerează fiecare particulă până la pozițiile sale optime în conformitate cu reguli matematice simple. Optimizarea roiurilor de particule a fost aplicată în multe industrii. Are puțini parametri de reglat, iar o versiune care funcționează bine pentru aplicații specifice poate funcționa bine și cu mici modificări într-o gamă largă de aplicații conexe. [40] O carte a lui Kennedy și Eberhart descrie câteva aspecte filosofice ale aplicațiilor de optimizare cu roiuri de particule și inteligență pentru roiuri. [41] Poli a efectuat un sondaj amplu asupra aplicațiilor. [42] [43]
Altruism
Cercetătorii elvețieni au dezvoltat un algoritm bazat pe regula de selecție parentală a lui Hamilton. Algoritmul arată cum altruismul într-un roi de entități poate, în timp, să evolueze și să conducă la o formare mai eficientă de roi. [44] [45]
Evoluția roitorilor
Insecte

Furnicile
Muste
Albine
Beatles
Lăcuste

Migrarea insectelor

Păsări
Migrația păsărilor
Viata marina
Peşte
Migrația peștilor
Krill
Copepode
Flori de alge
Plantă
Bacterii
Mamifere


oameni
Robotica
Militar
Galerie de imagini

Un roi de hering migrator

Un roi de albine

Salpidele aranjate în lanțuri formează roiuri uriașe.

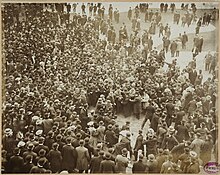
Oamenii care roiesc printr-o ieșire nu se comportă întotdeauna ca un fluid.

Un roi de buburuze

Un roi de roboți

Un roi de stele antice








Mituri
Notă
- ^ Roland Bouffanais, Design and Control of Swarm Dynamics , în SpringerBriefs in Complexity , Prima ediție, Springer, 2016, DOI : 10.1007 / 978-981-287-751-2 , ISBN 978-981-287-750-5 .
- ^ (EN) O'Loan și Evans, Starea staționară alternativă în flocarea unidimensională , în Journal of Physics A: Mathematical and General, vol. 32, nr. 8, 1998, pp. L99-L105, Bibcode : 1999JPhA ... 32L..99O , DOI : 10.1088 / 0305-4470 / 32/8/002 , arXiv : cond-mat / 9811336 .
- ^ a b c ( EN ) CW Reynolds, Turme, turme și școli: un model comportamental distribuit , în Computer Graphics , vol. 21, n. 4, 1987, pp. 25-34, DOI : 10.1145 / 37401.37406 , ISBN 978-0-89791-227-3 .
- ^ (EN) Interacțiunea care conduce comportamentul colectiv al animalelor depinde de distanța topologică mai degrabă decât de metrică: dovezi dintr-un studiu de teren , în Proc. Natl. Acad. Sci. SUA , vol. 105, nr. 4, 2008, pp. 1232-7, Bibcode : 2008PNAS..105.1232B , DOI : 10.1073 / pnas.0711437105 , PMID 18227508 , arXiv : 0709.1916 .
- ^ (EN) Afișări aeriene autoorganizate de Mii de grauri: un model , în Ecologie comportamentală, vol. 21, n. 6, 2010, pp. 1349-1359, DOI : 10.1093 / beheco / arq149 .
- ^ (EN) Unele cauze ale formei variabile a efectivelor de păsări , în PLOS One, vol. 6, nr. 8, 2011, p. e22479, Bibcode : 2011PLoSO ... 622479H , DOI : 10.1371 / journal.pone.0022479 , PMID 21829627 .
- ^ (RO) Roiuri și școli - Autoorganizare și comportament complex , pe rug.nl.
- ^ (EN) Cercetare la Facultatea de Științe și Inginerie , a rug.nl.
- ^ ( EN )Interacțiune critică între prădarea dependentă de densitate și evoluția turmei egoiste , în Proceedings of GECCO 2013 , Gecco '13, 2013, pp. 247-254, DOI : 10.1145 / 2463372.2463394 , ISBN 9781450319638 .
- ^ (EN) Evoluarea comportamentului colectiv într-o ecologie artificială , în Viața artificială, vol. 7, nr. 2, 2001, pp. 191-209, DOI : 10.1162 / 106454601753139005 , PMID 11580880 .
- ^ (EN) Evoluția simulată a comportamentului egoist al turmei , în Journal of Theoretical Biology, vol. 234, nr. 2, 2005, pp. 213-225, DOI : 10.1016 / j.jtbi.2004.11.035 , PMID 15757680 .
- ^ (EN) Evoluția turmei egoiste: apariția unor strategii de agregare distincte într-un model individual , în Proc Biol Sci, vol. 274, nr. 1618, 2007, pp. 1637-1642, DOI : 10.1098 / rspb.2007.0306 , PMID 17472913 .
- ^ (EN) Confuzia prădătorilor este suficientă pentru a evolua comportamentul de roire , JR Soc. Interface, vol. 10, nr. 85, 2013, p. 20130305, DOI : 10.1098 / rsif.2013.0305 , PMID 23740485 .
- ^ (EN) Simularea atacurilor de prădători asupra școlilor: tactici compozite în evoluție (PDF), în Ecologic Modeling, vol. 304, 2015, pp. 22-33, DOI :10.1016 / j.ecolmodel.2015.02.018 .
- ^ (EN) Tosh CR, Care promovează condițiile negative selecție dependentă de densitate pe agregate de pradă? ( PDF ), în Journal of Theoretical Biology , vol. 281, nr. 1, 2011, pp. 24-30, DOI : 10.1016 / j.jtbi.2011.04.014 , PMID 21540037 .
- ^ (EN) Fish Predator Select pentru mișcare colectivă coordonată în pradă virtuală , în Știință, vol. 337, nr. 6099, 2012, pp. 1212-1215, Bibcode : 2012Sci ... 337.1212I , DOI : 10.1126 / science.1218919 , PMID 22903520 .
- ^ (EN) Explorarea evoluției unui compromis între vigilență și hrănire în organismele care trăiesc în grup , în Royal Society Open Science, vol. 2, nr. 9, 2015, p. 150135, Bibcode : 2015RSOS .... 250135O , DOI : 10.1098 / rsos.150135 , PMID 26473039 , arXiv : 1408.1906 .
- ^ (EN) Hierarchy of Life , pe authorstream.com.
- ^ (EN) v H. D. Parunak, Making swarming happen, în Proceedings of the Conference on Swarming and Network Enabled Command, Control, Communications, Computers, Intelligence, Surveillance and Reconnaissance (C4ISR), Virginia, SUA, McLean, 3 Ianuarie 2003.
- ^ a b ( EN ) L. Marsh și C. Onof, epistemologie stigmergică, cogniție stigmergică ( PDF ), în Cognitive Systems Research , vol. 9, nr. 1, 2008, pp. 136-149, DOI : 10.1016 / j.cogsys.2007.06.009 .
- ^ (EN) G. Beni și J. Wang, Swarm Intelligence in Cellular Robotic Systems, Proceed. Workshop avansat NATO despre roboți și sisteme biologice , Toscana, Italia, 26-30 iunie 1989.
- ^ (EN) și M. M. Dorigo Birattari, Swarm Intelligence , în scholarpedia, vol. 2, nr. 9, 2007, p. 1462, Bibcode : 2007SchpJ ... 2.1462D , DOI : 10.4249 / scholarpedia.1462 .
- ^ A b (EN) Mecanisme minime pentru formarea școlii în particule autopropulsate (PDF), în Physica D: Nonlinear Phenomena, vol. 237, nr. 5, 2007, pp. 699-720, Bibcode : 2008PhyD..237..699L , DOI : 10.1016 / j.physd.2007.10.009 .
- ^ (EN) J. Toner și Y Tu, ordine pe termen lung într-un model bidimensional xy: cum păsările zboară împreună în Physical Revue Letters, vol. 75, nr. 23, 1995, pp. 4326-4329.
- ^ (EN) Modele de roire într-un model cinematic bidimensional pentru grupuri biologice , în SIAM J Appl Math, vol. 65, nr. 1, 2004, pp. 152-174, Bibcode : 2004APS..MAR.t9004T , DOI : 10.1137 / S0036139903437424 .
- ^ (EN) Un model continuu nelocal pentru agregare biologică , în Bull Math Biol, vol. 68, nr. 7, 2006, pp. 1601-1623, DOI : 10.1007 / s11538-006-9088-6 , PMID 16858662 , arXiv : q-bio / 0504001 .
- ^ (EN) J. Carrillo, M. Fornasier și G. Toscani, Particle, kinetic, and hydrodynamic models of swarming (PDF), în Modelare și simulare în știință, inginerie și tehnologie, vol. 3, 2010, pp. 297-336, DOI : 10.1007 / 978-0-8176-4946-3_12 , ISBN 978-0-8176-4945-6 .
- ^ Optimizarea coloniei de furnici Adus , la iridia.ulb.ac.be . Adus la 15 decembrie 2010 .
- ^ (EN) Colorni A., M. Dorigo și V. Maniezzo, Distributed Optimization by Ant Colonies, acte de la prima conferință europeană asupra vieții artificiale, Paris, Franța, Editura Elsevier, 1991, pp. 134-142.
- ^ ( EN ) M. Dorigo, Optimization, Learning and Natural Algorithms , în teza de doctorat , Milano, Politecnico di Milano, 1992.
- ^(EN) Hölldobler & Wilson (1990), pp. 143–179
- ^ (EN) M. Dorigo, G. Di Caro și LM Gamberella, Algoritmi de furnici pentru optimizarea discretă, viața artificială, MIT Press, 1999.
- ^ a b ( EN ) Nou tip de tranziție de fază într-un sistem de particule auto-antrenate , în Physical Review Letters , vol. 75, nr. 6, 1995, pp. 1226-1229, Bibcode : 1995PhRvL..75.1226V , DOI : 10.1103 / PhysRevLett.75.1226 , PMID 10060237 , arXiv : cond-mat / 0611743 .
- ^ (EN) Comportamentul colectiv al particulelor autopropulsate care interacționează , în Physica A, vol. 281, nr. 1-4, 2006, pp. 17-29, Bibcode : 2000PhyA..281 ... 17C , DOI : 10.1016 / S0378-4371 (00) 00013-3 , arXiv : cond-mat / 0611742 .
- ^ (EN) De la dezordine la ordine în lăcuste în marș (PDF), în Știință, vol. 312, n. 5778, 2006, pp. 1402-1406, Bibcode : 2006Sci ... 312.1402B , DOI : 10.1126 / science.1125142 , PMID 16741126 . Adus la 13 aprilie 2011 (arhivat din original la 29 septembrie 2011) .
- ^ ( EN ) Hydrodynamics and phases of flocks ( PDF ), in Annals of Physics , vol. 318, n. 1, 2005, pp. 170-244, Bibcode : 2005AnPhy.318..170T , DOI : 10.1016/j.aop.2005.04.011 . URL consultato il 16 luglio 2020 (archiviato dall' url originale il 18 luglio 2011) .
- ^ ( EN ) E. Bertin, Droz e G. Grégoire, Hydrodynamic equations for self-propelled particles: microscopic derivation and stability analysis , in J. Phys. A , vol. 42, n. 44, 2009, p. 445001, Bibcode : 2009JPhA...42R5001B , DOI : 10.1088/1751-8113/42/44/445001 , arXiv : 0907.4688 .
- ^ ( EN ) J. Kennedy e R. Eberhart, Particle Swarm Optimization , in Proceedings of IEEE International Conference on Neural Networks , IV, 1995, pp. 1942-1948.
- ^ ( EN ) J. Kennedy, The particle swarm: social adaptation of knowledge , in Proceedings of IEEE International Conference on Evolutionary Computation , 1997, pp. 303-308.
- ^ ( EN ) X. Hu, Particle swarm optimization: Tutorial , su swarmintelligence.org . URL consultato il 15 dicembre 2010 .
- ^ ( EN ) J. Kennedy e RC Eberhart, Swarm Intelligence , Morgan Kaufmann, 2001, ISBN 978-1-55860-595-4 .
- ^ ( EN ) R. Poli, An analysis of publications on particle swarm optimisation applications ( PDF ), in Technical Report CSM-469 , 2007. URL consultato il 16 luglio 2020 (archiviato dall' url originale il 16 luglio 2011) .
- ^ ( EN ) R. Poli, Analysis of the publications on the applications of particle swarm optimisation ( PDF ), in Journal of Artificial Evolution and Applications , vol. 2008, 2008, pp. 1-10, DOI : 10.1155/2008/685175 .
- ^ Altruism helps swarming robots fly better , su genevalunch.com , 4 maggio 2011 (archiviato dall' url originale il 15 settembre 2012) .
- ^ ( EN ) M. Waibel, D. Floreano e L. Keller, A quantitative test of Hamilton's rule for the evolution of altruism , in PLOS Biology , vol. 9, n. 5, 2011, p. 1000615, DOI : 10.1371/journal.pbio.1000615 , PMID 21559320 .
Bibliografia
- Blum C e Merkle D (2008) Swarm intelligence: introduzione e applicazioni Springer. ISBN 978-3-540-74088-9 .
- Camazine S, Deneubourg JL, Franks NR, Sneyd J, Theraulaz G e Bonabeau E (2003) Auto-organizzazione nei sistemi biologici Princeton University Press. ISBN 978-0-691-11624-2 .
- Fisher L (2009) Lo sciame perfetto: la scienza della complessità nella vita quotidiana Libri base. ISBN 978-0-465-01884-0 .
- Kennedy JF, Kennedy J, Eberhart RC e Shi Y (2001) Swarm intelligence Morgan Kaufmann. ISBN 978-1-55860-595-4 .
- Krause, J (2005) Vivere in gruppi Oxford University Press. ISBN 978-0-19-850818-2
- Lim CP, Jain LC e Dehuri S (2009) Innovazioni in Swarm Intelligence Springer. ISBN 978-3-642-04224-9 .
- Miller, Peter (2010) The Smart Swarm: come la comprensione di greggi, scuole e colonie può renderci migliori nel comunicare, prendere decisioni e portare a termine le attività Penguin, ISBN 978-1-58333-390-7
- Nedjah N e Mourelle LdM (2006) Swarm sistemi intelligenti Springer. ISBN 978-3-540-33868-0 .
- Sumpter, David JT (2010) Comportamento animale collettivo Princeton University Press. ISBN 978-0-691-14843-4 .
- Collective motion , in Physics Reports , vol. 517, 3–4, 2012, pp. 71–140, Bibcode : 2012PhR...517...71V , DOI : 10.1016/j.physrep.2012.03.004 , arXiv : 1010.5017 .
Voci correlate
Altri progetti
-
 Wikimedia Commons contiene immagini o altri file su Formazione a sciame
Wikimedia Commons contiene immagini o altri file su Formazione a sciame
Collegamenti esterni
- Articolo del New York Times sulle indagini sullo sciame
- Dal Wolfram Demonstrations Project - richiede un lettore CDF (gratuito) :
| Controllo di autorità | LCCN ( EN ) sh2009002808 |
|---|