Metoda elementului finit
Metoda elementelor finite ( FEM , din metoda engleză a elementelor finite ) este o tehnică numerică concepută pentru a căuta soluții aproximative ale problemelor descrise prin ecuații diferențiale parțiale prin reducerea acestora din urmă la un sistem de ecuații algebrice .
Deși concurează în unele zone limitate cu alte strategii numerice ( metoda diferenței finite , metoda volumului finit , metoda elementului de graniță, metoda celulei , metoda spectrală etc.), FEM menține o poziție dominantă în panorama tehnicilor numerice. nucleul majorității codurilor de analiză automată disponibile pe piață.
În general, metoda elementelor finite se pretează foarte bine la rezolvarea ecuațiilor diferențiale parțiale atunci când domeniul are o formă complexă (cum ar fi șasiul unei mașini sau motorul unui avion), când domeniul este variabil (de exemplu, un solid de reacție cu condiții variabile la graniță), când precizia solicitată a soluției nu este omogenă pe domeniu (într-un test de impact pe o mașină, precizia necesară este mai mare în apropierea zonei de impact) și când soluția căutată lipsește de regularitate. Mai mult, metoda este baza analizei elementelor finite .
fundal
Metoda elementelor finite își are originea în nevoia de a rezolva probleme complexe de analiză elastică și structurală în domeniul ingineriei civile și aeronautice . [1] Originile metodei pot fi urmărite în anii 1930 - 35 cu lucrările lui AR Collar și WJ Duncan, [2] care au introdus o formă primitivă de element structural în rezolvarea unei probleme de aeroelasticitate și în Anii 1940 - 41 cu lucrările lui Alexander Hrennikoff și Richard Courant , unde ambii, deși în abordări diferite, împărtășeau ideea de a împărți domeniul problemei în subdomenii de formă simplă (elementele finite). [3]
Cu toate acestea, nașterea și dezvoltarea efectivă a metodei elementelor finite au avut loc în a doua jumătate a anilor 1950 cu contribuția fundamentală a lui MJ (Jon) Turner de la Boeing , care a formulat și perfecționat metoda rigidității directe , prima abordare a elementelor a ajuns în domeniul continuității. Munca lui Turner a găsit difuzie în afara câmpurilor înguste ale ingineriei aerospațiale și, în special, în ingineria civilă, prin lucrarea lui John Argyris de la Universitatea din Stuttgart (care în aceiași ani propusese o unificare formală a metodei forțelor și a deplasării metodă prin sistematizarea conceptului de asamblare a relațiilor unui sistem structural pornind de la relațiile elementelor componente), și de Ray W. Clough de la Universitatea din Berkeley [4] (care a vorbit mai întâi despre FEM și a cărui colaborare cu Turner a avut-o a dat naștere faimoasei opere, [5] considerată ca începutul FEM-ului modern).
Alte contribuții fundamentale la istoria FEM sunt cele ale Irons BM, cărora li se datorează elementele izoparametrice , conceptul funcției de formă, testul patch-ului și solverul frontal (un algoritm pentru rezolvarea sistemului algebric liniar), de RJ Melosh, care a plasat FEM în clasa metodelor Rayleigh-Ritz și a sistematizat formularea sa variațională (o expunere riguroasă și celebră a bazei matematice a metodei a fost furnizată și în 1973 de Strang și Fix [6] ) și de ELWilson, care a dezvoltat prima (și imitat pe scară largă) software open source FEM care a dat naștere SAP . [7]
În 1967 Zienkiewicz a publicat prima carte despre elemente finite. Din anii 1970 , FEM a găsit o utilizare pe scară largă ca strategie de modelare numerică a sistemelor fizice într-o mare varietate de discipline de inginerie, de exemplu electromagnetism , [8] [9] dinamica fluidelor , calcul structural și geotehnică . De-a lungul anilor s-au născut majoritatea codurilor comerciale de analiză FEM ( NASTRAN, ADINA, ANSYS, ABAQUS, SAMCEF, MESHPARTS, etc. ) încă disponibile astăzi.
Operațiune
Metoda FEM se aplică corpurilor fizice care pot fi împărțite într-un anumit număr, chiar foarte mare, de elemente de formă definită și dimensiuni mici. În continuum, fiecare element finit este considerat un câmp de integrare numerică cu caracteristici omogene.
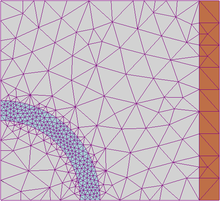
Principala caracteristică a metodei elementelor finite este discretizarea prin crearea unei grile ( mesh ) compusă din primitive ( elemente finite ) de formă codificată (triunghiuri și patrulatere pentru domenii 2D , tetraedre și hexaedru pentru domenii 3D ). Pe fiecare element caracterizat de această formă elementară, se presupune că soluția problemei este exprimată prin combinația liniară de funcții numite funcții de bază sau funcții de formă . Trebuie remarcat faptul că uneori funcția este aproximată, iar valorile exacte ale funcției nu vor fi neapărat cele calculate în puncte, ci valorile care vor oferi cea mai mică eroare pe întreaga soluție.
Exemplul tipic este cel care se referă la funcțiile polinomiale, astfel încât soluția generală a problemei este aproximată cu o funcție polinomială în bucăți. Numărul de coeficienți care identifică soluția pe fiecare element este, prin urmare, legat de gradul polinomului ales. La rândul său, aceasta guvernează acuratețea soluției numerice găsite.
În forma sa originală și încă mai răspândită, metoda elementelor finite este utilizată pentru a rezolva probleme bazate pe legi constitutive liniare. Problemele de stres sunt tipice - deformări în domeniul elastic, difuzia căldurii în interiorul unui corp material. Unele soluții mai rafinate permit explorarea comportamentului materialelor chiar și într-un câmp extrem de neliniar, presupunând comportamente plastice sau visco-plastice. Mai mult, uneori sunt luate în considerare problemele cuplate , în cadrul cărora pot fi rezolvate simultan diferite aspecte complementare, fiecare dintre ele putând fi urmărit înapoi la o analiză FEM separată. Tipică în acest sens este problema geotehnică a comportamentului unui anumit sol (câmp geomecanic) în prezența mișcărilor de filtrare a apelor subterane (câmp hidrogeologic).
Metoda elementelor finite face parte din clasa metodei lui Galërkin , al cărei punct de plecare este așa-numita formulare slabă a unei probleme diferențiale. Această formulare, bazată pe conceptul de derivată în sensul distribuțiilor , a integralei Lebesgue și a mediei ponderate (prin intermediul funcțiilor adecvate numite funcții de testare ), are marele avantaj de a solicita din soluție caracteristici de regularitate realiste pentru (aproape) toate problemele de inginerie și, prin urmare, este un instrument descriptiv foarte util. Metodele de tip Galërkin se bazează pe ideea aproximării soluției problemei scrise în formă slabă prin intermediul unei combinații liniare de funcții de formă elementare. Coeficienții acestei combinații liniare (numite și „grade de libertate”) devin necunoscutele problemei algebrice obținute prin discretizare. Elementele finite se disting prin alegerea funcțiilor de bază polinomiale în bucăți. Alte metode de tip Galërkin, cum ar fi metodele spectrale, utilizează diferite funcții de bază.
Pași pentru a ajunge la model
Pentru a ajunge la model la elementele finale, urmăm pașii fundamentali, fiecare dintre aceștia implicând inserarea erorilor în soluția finală:
- Modelare: această fază este prezentă în toate studiile de inginerie: trecem de la sistemul fizic la un model matematic, care abstractizează unele aspecte de interes din sistemul fizic, concentrând atenția asupra câtorva variabile agregate de interes și „filtrând” pe cele rămase. De exemplu, la calcularea momentului de încovoiere al unui fascicul, interacțiunile la nivel molecular nu sunt luate în considerare. Sistemul fizic dacă este complex este împărțit în subsisteme. În cazul în cauză, nu este necesar sau se poate presupune că este o parte care aparține unui sistem mai complex, de exemplu o navă sau un avion. Subsistemul va fi apoi împărțit în elemente finite cărora li se va aplica un model matematic. Spre deosebire de tratamentele analitice, este suficient ca modelul matematic ales să fie potrivit pentru geometriile simple ale elementelor finite. Alegerea unui tip de element într-un program software este echivalentă cu o alegere implicită a modelului matematic care stă la baza acestuia. Eroarea care poate duce la utilizarea unui model trebuie evaluată cu teste experimentale, operație care este în general costisitoare în termeni de timp și resurse.
- Discretizare: într-o simulare numerică este necesar să se treacă de la un număr infinit de grade de libertate (condiție proprie „continuumului”) la un număr finit (situație proprie grilei). Discreționarea, în spațiu sau timp, își propune să obțină un model discret caracterizat printr-un număr finit de grade de libertate. Se introduce o eroare dată de discrepanța cu soluția exactă a modelului matematic. Această eroare poate fi evaluată în mod corespunzător dacă există un model matematic adecvat pentru întreaga structură (de aceea este de preferat să se utilizeze în ceea ce privește analiza FEM) și în absența erorilor numerice de calcul, acest lucru poate fi considerat adevărat folosind calculatoare electronice.
Caracteristicile elementelor
Fiecare element este caracterizat prin:
- Dimensiune: 1D, 2D, 3D.
- Noduri: puncte precise ale elementului care identifică geometria acestuia. Fiecare nod al elementului este asociat cu valoarea unui câmp sau gradient care afectează întreaga structură. În cazul elementelor mecanice, câmpul este cel al reacțiilor de constrângere și al deplasărilor .
- Gradele de libertate : valorile posibile pe care le pot lua câmpurile sau gradienții din noduri, două noduri adiacente au aceleași valori.
- Forțe asupra nodurilor: forțe externe aplicate nodurilor sau efectul reacțiilor de sprijin. Există o relație de dualitate între forțele de constrângere și reacții. Spus vectorul forțelor externe pe un nod ed vectorul DOF (din engleza "Degree Of Freedom", grade de libertate), se presupune liniaritatea între Și :


- unde este Acesta ia numele matricei de rigiditate (matrice de rigiditate). Această relație identifică dualitatea dintre forțe externe și deplasări. Produsul scalar este asociat cu valoarea muncii efectuate de forțe externe. Termenii forță, reacție de constrângere și matrice de rigiditate sunt extinse dincolo de sfera structurilor mecanice în care s-a născut analiza FEM.



- Proprietăți constitutive: proprietățile elementului și comportamentul acestuia. Apoi va fi definit un material izotrop cu comportament elastic liniar, definit ca un modul Young și un raport Poisson.
- Soluția unui sistem de ecuații, inclusiv neliniare, rezolvate numeric de computer. O eroare numerică neglijabilă este introdusă în cazul sistemelor liniare, cum ar fi cel analizat.
Tipologia elementelor finite
Toate programele care utilizează metoda elementelor finite pentru analiza structurală sunt echipate cu o bibliotecă de elemente finite unidimensionale, bidimensionale și tridimensionale (în câmpul elastic liniar dar și în cel elastic-plastic) pentru a facilita modelarea a unei structuri reale.
Cele mai frecvente sunt următoarele.
- unidimensional:
- tija sau biela sau ferma : element rectiliniu cu 2 noduri care are rigiditate doar pentru translații și, prin urmare, este capabil să transmită doar forțe axiale. Este utilizat în mod normal pentru modelarea structurilor de rețea.
- grindă sau grindă : element rectiliniu cu 2 noduri capabile să transfere rigidități pentru toate cele 6 grade de libertate către nodurile la care este conectat și, prin urmare, capabil să transmită toate tipurile de solicitări (forțe axiale și de forfecare și momente de îndoire și răsucire). Este folosit pentru modelarea structurilor încadrate. Unele programe au, de asemenea, elementul de grindă pe teren elastic la Winkler pentru modelarea grinzilor de fundație pe teren elastic.
- arc sau limită sau arc : element rectiliniu cu două noduri cu rigiditate axială și / sau de rotație utilizat pentru modelarea diferitelor tipuri de constrângeri elastice, cum ar fi, de exemplu, deplasările impuse;
- rigid sau rigel : element rectiliniu cu 2 noduri infinit de rigid utilizat pentru modelarea unei legături infinit de rigide între două elemente finite;
- bidimensional:
- planșeu sau plan de tensiune : element plat cu 3 sau 4 noduri pentru stări de tensiune plană care are doar două grade de libertate pe nod corespunzătoare translațiilor în planul său (rigiditate a membranei) și, prin urmare, capabil să transmită doar tensiunile de-a lungul planului său. Nu transferă nici o rigiditate pentru celelalte grade de libertate. Folosit pentru modelarea structurilor încărcate în propriul plan;
- placă : element plat cu 3 sau 4 noduri care are doar trei grade de libertate pe nod corespunzător translației perpendiculare pe planul său și rotațiilor față de cele două axe aflate în plan (rigiditate la îndoire) și, prin urmare, capabile să transmită doar forța de forfecare și 2 momente de încovoiere. Nu transferă nici o rigiditate pentru celelalte grade de libertate. Folosit pentru modelarea structurilor bidimensionale flexate. Unele programe au și placa Winkler pe elementul de sol utilizat pentru modelarea plăcilor de fundație pe teren elastic;
- placă-placă sau înveliș sau înveliș : element plat cu 3 sau 4 noduri constând din suprapunerea elementului de placă și a elementului de placă și care are, prin urmare, atât rigiditate flexurală, cât și rigiditate membranară.
- deformare plană sau tensiune plană: elementul de podea 3 sau 4 noduri pentru stările de tensiune plană care posedă doar două grade de libertate pentru nodul corespunzător mișcării de translație în planul său. Nu transferă nici o rigiditate pentru celelalte grade de libertate. Este utilizat pentru modelarea structurilor în care grosimea este predominantă față de celelalte dimensiuni și unde deformarea în grosime poate fi considerată împiedicată și, prin urmare, starea de deformare este considerată plană ca și în analiza secțiunilor conductelor sau a reținerii ziduri.
- aximetric : element plat cu 3 sau 4 noduri reprezentând un sector al unui radian cu o structură radial simetrică. Acest element este utilizat pentru modelarea structurilor solide obținute prin rotație a căror simetrie radială este obținută pentru a analiza doar un sector al structurii amplitudinii unui radian. Fiecare nod are 2 grade de libertate corespunzătoare traducerilor în planul său;
- tridimensional:
- element de cărămidă sau solid : element de la 4 la 27 de noduri care are doar trei grade de libertate pe nod corespunzător celor trei traduceri. Nu transferă nici o rigiditate pentru celelalte grade de libertate. Este un element finit capabil să modeleze elemente structurale solide în care, adică, nu există o dimensiune neglijabilă în comparație cu celelalte. Acest element este capabil să interpreteze o stare de solicitare tridimensională. Folosit de exemplu pentru modelarea stratigrafiei solului.
Noduri
Definiția geometriei modelului care idealizează structura reală se realizează prin plasarea de noduri sau puncte nodale pe structură în corespondență cu punctele caracteristice.
La poziționarea nodurilor pe structură, trebuie luate în considerare unele considerații:
- numărul de noduri trebuie să fie suficient pentru a descrie geometria structurii. De exemplu, în corespondență cu conexiunea fascicul-stâlp, schimbări de direcție etc.
- nodurile trebuie, de asemenea, poziționate în puncte și pe linii de rupere. De exemplu, în cazul în care se schimbă caracteristicile materialelor, caracteristicile secțiunilor etc.
- nodurile pot fi plasate în puncte care nu sunt necesare pentru definirea geometrică a structurii, dar ale căror deplasări și solicitări interne trebuie cunoscute
- dacă software-ul nu îl prevede, nodurile trebuie poziționate în puncte în care se aplică sarcini concentrate sau mase nodale
- nodurile trebuie plasate în toate punctele care trebuie restricționate
- în cazul structurilor bidimensionale (plăci, plăci etc.), subdiviziunea ( plasă ) în elemente finite bidimensionale trebuie să fie suficient de densă pentru a surprinde variațiile de solicitare sau de deplasare în regiunile importante pentru analiză.
Formulare unidimensională pentru ecuații de ordinul doi
Să se dea o ecuație diferențială parțială sub forma:

limitat la domeniu și condiții de graniță :
![\ left [a, b \ right]](https://wikimedia.org/api/rest_v1/media/math/render/svg/f30926fb280a9fdf66fd931e14d4363cb824feaa)

unde este este un vector care conține punctele lui Și este un vector care conține valorile asumate de funcție în astfel de puncte. Condițiile exprimate în această formă se mai numesc Dirichlet . De asemenea, este posibil să furnizați ca condiții de graniță valoarea asumată de prima derivată a funcției și, în acest caz, acestea se numesc condiții Neumann .

![\ partial \ left [a, b \ right]](https://wikimedia.org/api/rest_v1/media/math/render/svg/557a4be693310492f000770afe736f721aff50db)


Metoda elementelor finite implică înmulțirea ambilor membri cu o funcție de testare :


Integrarea ambilor membri în domeniu duce la:

Profitând de integrarea pe părți, este posibil să se extindă primul termen:
![\ int _ {{a}} ^ {{b}} {\ frac {\ partial v} {\ partial x}} \ cdot {\ frac {\ partial u} {\ partial x}} \ cdot \ alpha \ left (x \ right) dx- \ left [v \ left (x \ right) \ cdot \ alpha \ left (x \ right) \ cdot {\ frac {\ partial u} {\ partial x}} \ right] _ { {a}} ^ {{b}} + \ int _ {{a}} ^ {{b}} v \ left (x \ right) \ cdot \ sigma \ left (x \ right) \ cdot u \ left ( x \ dreapta) dx =](https://wikimedia.org/api/rest_v1/media/math/render/svg/6a01563747d72c52941192502b3c7f090c80a796)

asa de:

![= \ int _ {{a}} ^ {{b}} v \ left (x \ right) \ cdot f \ left (x \ right) dx + \ left [v \ left (x \ right) \ cdot \ alpha \ left (x \ right) \ cdot {\ frac {\ partial u} {\ partial x}} \ right] _ {{a}} ^ {{b}} (\ forall v \ left (x \ right))](https://wikimedia.org/api/rest_v1/media/math/render/svg/6d1246ac9c666b59037506d8a02178c5f204ff42)
Aproximarea elementelor finite este o aproximare Galërkin și se realizează în acest moment prin discretizarea domeniului în spațiu care admite o bază care constă în general din polinoame în bucăți de grad scăzut.


Discretizarea domeniului în cazul unidimensional se face prin divizare în intervale cu Și
![\ left [x _ {{j-1}}, x _ {{j}} \ right]](https://wikimedia.org/api/rest_v1/media/math/render/svg/89d76ac1c4a165ee0bf85f99e0795d219d470c41)


Funcții sunt exprimate în general sub forma:


Prin urmare, formularea slabă prevede determinarea astfel încât egalitatea să fie verificată:


![= \ int _ {{a}} ^ {{b}} \ phi _ {{j}} \ left (x \ right) \ cdot f \ left (x \ right) dx + \ left [\ phi _ {{ j}} \ left (x \ right) \ cdot \ alpha \ left (x \ right) \ cdot {\ frac {\ partial u _ {{h}}} {\ partial x}} \ right] _ {{a }} ^ {{b}} (\ forall j = 1, \ dots, m)](https://wikimedia.org/api/rest_v1/media/math/render/svg/5baf29e31cd015599ca3819c73522bf3da90cb32)
Având în vedere calitatea de membru al la spațiul cu bază , poti sa scrii ca:



Efectuând înlocuirea și colectarea, obținem:

Această egalitate poate fi exprimată sub formă de matrice ca:
![\ left [{\ begin {array} {cccc} a _ {{11}} & a _ {{12}} & ... & a _ {{1m}} \\ a _ {{21}} & a _ {{22}} &. .. & a _ {{2m}} \\ ... & ... & ... & ... \\ a _ {{m1}} & a _ {{m2 }} & ... & a _ {{mm}} \ end {array}} \ right] \ cdot \ left [{\ begin {array} {c} U _ {{1}} \\ U _ {{ 2}} \\ ... \\ U _ {{m}} \ end {array}} \ right] = \ left [{\ begin {array} {c} f _ {{1}} \\ f _ {{2}} \\ ... \\ f _ {{m}} \ end {array}} \ right]](https://wikimedia.org/api/rest_v1/media/math/render/svg/ebc5d2d925ac690b614594c6249ed36654e50521)
unde termenii matricilor sunt exprimați ca:

![f _ {{j}} = \ int _ {{a}} ^ {{b}} \ phi _ {{j}} \ left (x \ right) \ cdot f \ left (x \ right) dx + \ left [\ phi _ {{j}} \ left (x \ right) \ cdot \ alpha \ left (x \ right) \ cdot {\ frac {\ partial u _ {{h}}} {\ partial x}} \ dreapta] _ {{a}} ^ {{b}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/66ca8272678da01d8110fdfefbc26f0346a3e6c0)
Rezoluția sistemului liniar permite determinarea coeficienților . Acești coeficienți permit determinarea aproximării în spațiul discretizat situat în domeniul necesar.

Caz de coeficienți constanți și aproximare la centrul de greutate
În general, determinarea matricilor de rigiditate și sarcină necesită utilizarea metodelor de cvadratură pentru a calcula valoarea integralelor definite. Cu toate acestea, un caz special și interesant este acela în care coeficienții ecuației diferențiale sunt constanți. În acest caz, este posibilă o soluție exactă și deosebit de eficientă a ecuației diferențiale. De fapt, presupunând:

integralele care alcătuiesc elementele matricilor devin:
![a_{{ij}}=\alpha \int _{{a}}^{{b}}{\frac {\partial \phi _{{i}}}{\partial x}}\cdot {\frac {\partial \phi _{{j}}}{\partial x}}dx+\sigma \int _{{a}}^{{b}}\phi _{{i}}\left(x\right)\cdot \phi _{{j}}\left(x\right)dx\qquad f_{{i}}=f\cdot \int _{{a}}^{{b}}\phi \left(x\right)dx+\alpha \cdot \left[\phi _{{j}}\left(x\right)\cdot {\frac {\partial u_{{h}}}{\partial x}}\right]_{{a}}^{{b}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/819dfc07fcbb14dbb8d65d95fbbcfb89058165a2)
Sostituendo alle funzioni di forma il valore corretto è possibile trovare una formulazione esatta degli integrali come funzione di variabili scelte. Considerando un singolo elemento costituente il dominio, compreso tra i nodi ie , con le definizioni date in precedenza delle funzioni si ottiene una matrice di rigidezza quadrata 2x2 del tipo:



![{\begin{aligned}A_{{k}}=\left\{a_{{ij}}\right\}_{{i,j=k}}^{{k+1}}&=\left\{\alpha \int _{{x_{{i}}}}^{{x_{{j}}}}{\frac {\partial \phi _{{i}}}{\partial x}}\cdot {\frac {\partial \phi _{{j}}}{\partial x}}dx+\sigma \int _{{x_{{i}}}}^{{x_{{j}}}}\phi _{{i}}\left(x\right)\cdot \phi _{{j}}\left(x\right)dx\right\}_{{i,j=k}}^{{k+1}}\\&=\left\{\alpha \int _{{x_{{i}}}}^{{x_{{j}}}}{\frac {1}{h_{{k}}}}\cdot {\frac {1}{h_{{k}}}}dx+\sigma \int _{{x_{{i}}}}^{{x_{{j}}}}\left(1+{\frac {1}{h_{{k}}}}\cdot \left(x-x_{{i}}\right)\right)\cdot \left(1+{\frac {1}{h_{{k}}}}\cdot \left(x-x_{{j}}\right)\right)dx\right\}_{{i,j=k}}^{{k+1}}\\&={\frac {\alpha }{h_{{k}}}}\cdot \left[{\begin{array}{cc}1&-1\\-1&1\end{array}}\right]+{\frac {\sigma h_{{k}}}{6}}\cdot \left[{\begin{array}{cc}2&1\\1&2\end{array}}\right]\\\end{aligned}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cf6c89085fad3a01e691a9ca00b159e02aa63974)
Tali matrici sono le uniche non nulle, data la forma della funzione . Esse vanno a costituire la matrice di rigidezza , che risulta quindi componibile a partire dalle matrici sopra definite.


Lo stesso procedimento si può attuare per la matrice dei carichi ottenendo:
![F_{{k}}={\frac {fh_{{k}}}{2}}\cdot \left[{\begin{array}{c}1\\1\end{array}}\right]+\left[{\begin{array}{c}\alpha \cdot \left[\phi _{{j}}\left(x\right)\cdot {\frac {\partial u_{{h}}}{\partial x}}\right]_{{a}}^{{b}}\\\alpha \cdot \left[\phi _{{j}}\left(x\right)\cdot {\frac {\partial u_{{h}}}{\partial x}}\right]_{{a}}^{{b}}\end{array}}\right]](https://wikimedia.org/api/rest_v1/media/math/render/svg/90fd1852b24b304942070f502207e8921b1d1f3d)
Componendo le matrici degli elementi nel modo corretto si giunge alla forma finale del sistema lineare:
![\left[{\begin{array}{ccccc}{\frac {\alpha }{h_{{1}}}}+{\frac {2\sigma h_{{1}}}{6}}&-{\frac {\alpha }{h_{{1}}}}+{\frac {\sigma h_{{1}}}{6}}&0&...&...\\-{\frac {\alpha }{h_{{1}}}}+{\frac {\sigma h_{{1}}}{6}}&\left({\frac {\alpha }{h_{{1}}}}+{\frac {2\sigma h_{{1}}}{6}}\right)+\left({\frac {\sigma }{h_{{2}}}}+{\frac {2\sigma h_{{2}}}{6}}\right)&-{\frac {\alpha }{h_{{2}}}}+{\frac {\sigma h_{{2}}}{6}}&0&...\\0&-{\frac {\alpha }{h_{{2}}}}+{\frac {\sigma h_{{2}}}{6}}&...&...&...\\...&0&...&...&...\\...&...&...&...&...\end{array}}\right]\cdot \left[{\begin{array}{c}U_{{1}}\\U_{{2}}\\...\\...\\U_{{m}}\end{array}}\right]=\left[{\begin{array}{c}{\frac {fh_{{1}}}{2}}+\alpha \cdot \left[\phi _{{j}}\left(x\right)\cdot {\frac {\partial u_{{h}}}{\partial x}}\right]_{{a}}^{{b}}\\{\frac {fh_{{1}}}{2}}+{\frac {fh_{{2}}}{2}}+2\cdot \alpha \cdot \left[\phi _{{j}}\left(x\right)\cdot {\frac {\partial u_{{h}}}{\partial x}}\right]_{{a}}^{{b}}\\...\\{\frac {fh_{{m}}}{2}}+\alpha \cdot \left[\phi _{{j}}\left(x\right)\cdot {\frac {\partial u_{{h}}}{\partial x}}\right]_{{a}}^{{b}}\end{array}}\right]](https://wikimedia.org/api/rest_v1/media/math/render/svg/09deddc680bd94f124e003e8c76d1203250241a6)
Tale semplice soluzione è possibile solo in caso di coefficienti costanti, come detto in precedenza. In caso di coefficienti non costanti è possibile accontentarsi di una soluzione molto approssimata ma computazionalmente semplice e veloce effettuando una approssimazione al baricentro delle funzioni, considerando cioè una media del valore delle funzioni agli estremi di ciascun elemento:

Tale approssimazione permette di sfruttare i risultati appena raggiunti anche in caso di coefficienti non costanti, al prezzo di una minore precisione.
Esempio monodimensionale
Un problema tipico, detto talvolta problema dell' equazione di Poisson , può essere trovare la funzione il cui laplaciano è uguale ad una funzione data. L'equazione di Poisson in uno spazio monodimensionale si scrive come segue:


con vari tipi di condizioni al bordo, fra cui ad esempio:




Le condizioni al contorno in generale si possono dividere in tre gruppi:
- Condizioni di Dirichlet : Condizione imposta sulla funzione (ordine 0).
- Condizioni di Neumann : Condizione imposta sulla derivata prima della funzione rispetto alla normale uscente al contorno (ordine 1).
- Condizioni di Robin : Condizione imposta sulla combinazione lineare del valore della funzione e della sua derivata (condizione mista).
Se ad esempio si fa riferimento alle condizioni di Dirichlet:
la forma variazionale del problema diventa trovare appartenente a un opportuno spazio funzionale di funzioni che si annullano al bordo tale che per ogni funzione nello stesso spazio funzionale si abbia:


L'approssimazione del metodo agli elementi si ottiene introducendo una suddivisione dell'intervallo in sotto-intervalli su ciascuno dei quali la soluzione verrà assunta essere polinomiale. Questo permette di scrivere la soluzione approssimata, indicata come , mediante combinazione lineare delle funzioni di base dello spazio delle funzioni polinomiali a pezzi, indicate come :



I coefficienti sono le incognite del problema discretizzato. Usando come funzioni test proprio le funzioni di base, si ottiene infatti un insieme di n equazioni:


Indicando con la matrice:
![A=[a_{{ij}}]=\int \limits _{0}^{1}\varphi _{j}^{\prime }\varphi _{i}^{\prime }dx](https://wikimedia.org/api/rest_v1/media/math/render/svg/0d1744be19be7bad8e478d13ea726d73061acc10)
con il vettore di elementi e con il vettore di elementi:



il problema algebrico da risolvere è dato semplicemente dal sistema lineare:

La matrice è detta "matrice di rigidezza".
Confronto con il Metodo alle Differenze Finite
Il metodo delle differenze finite (FDM, dall'inglese Finite Difference Method ) è un metodo alternativo per approssimare le soluzioni di equazioni differenziali alle derivate parziali . Le principali differenze tra i due metodi sono:
- La caratteristica più attraente degli elementi finiti è l'abilità di gestire geometrie complesse con relativa semplicità. Le differenze finite sono, nella loro forma base, ristrette alla gestione geometrie semplici, come rettangoli e alcune alterazioni non complesse.
- La metodologia degli elementi finiti è di più semplice implementazione.
- Esistono diversi modi per considerare le differenze finite un caso particolare dell'approccio agli elementi finiti. Per esempio la formulazione degli elementi finiti è identica alla formulazione delle differenze per l' equazione di Poisson se il problema è discretizzato usando una forma rettangolare con ogni rettangolo diviso in due triangoli.
- La qualità dell'approssimazione degli elementi finiti è maggiore del corrispettivo approccio alle differenze finite.
In generale, il metodo degli elementi finiti è il metodo di scelta per tutti i tipi di analisi per la meccanica strutturale (per esempio per calcolare la deformazione e la tensione di corpi rigidi o la dinamica delle strutture). Nella fluidodinamica computazionale invece si tende ad utilizzare altri metodi come il metodo dei volumi finiti . Problemi di fluidodinamica computazionale richiedono la discretizzazione del problema in un numero elevato di celle o nodi (in ordine di milioni), perciò il costo della soluzione favorisce approssimazioni più semplici e di ordine minore per ogni cella. Questo è particolarmente vero per problemi di aerodinamica per aerei e automobili o per simulazioni meteorologiche.
Il metodo di Galërkin
Il metodo di Galërkin consiste nell'uso delle stesse funzioni di forma utilizzate nell'approssimazione all'interno dei sotto-intervalli di cui sopra, come funzioni peso nel calcolo del residuo ai minimi quadrati applicato alla formulazione debole del problema strutturale.
Note
- ^ Phillippe G. Ciarlet, The Finite Element Method for Elliptic Problems , Amsterdam, North-Holland, 1978.
- ^ Felippa, Carlos A., A Historical Outline of Matrix Structural Analysis: A Play in Three Acts , in Computers & Structures (Volume 79, Issue 14, June 2001, Pages 1313-1324) , giugno 2001.
- ^ Waterman, Pamela J., Meshing: the Critical Bridge , in Desktop Engineering Magazine , 1º agosto 2008. URL consultato il 19 ottobre 2008 (archiviato dall' url originale il 20 novembre 2008) .
- ^ Ray W. Clough, Edward L. Wilson, Early Finite Element Research at Berkeley ( PDF ), su edwilson.org . URL consultato il 25 ottobre 2007 .
- ^ MJ Turner, RW Clough, HC Martin, and LC Topp, Stiffness and Deflection Analysis of Complex Structures , in Journal of the Aeronautical Sciences , vol. 23, 1956, pp. 805–82.
- ^ Gilbert Strang, George Fix,An Analysis of the Finite Element Method , Englewood Cliffs, Prentice-Hall, 1973, ISBN 9780130329462 .
- ^ Carlos A. Felippa, Introduction to Finite Element Methods , Lecture Notes for the course Introduction to Finite Elements Methods at the Aerospace Engineering Sciences Department of the University of Colorado at Boulder., from 1976.
- ^ Carlo Lonati, Gian Carlo Macchi; Dalmazio Raveglia, Crosstallk in a PAM technique telephone switching network due the skin effect. Approach with the Finite Element Method , Conference on the Computation of Magnetic Fields - Proceedings; Laboratoire d'Elecrotechnique, Grenoble, 1978.
- ^ John Leonidas Volakis, Arindam Chatterjee, Leo C. Kempel, Finite element method for electromagnetics: antennas, microwave circuits, and scattering applications , in IEEE Wiley Press , 1998.
Bibliografia
- ( EN ) G. Allaire and A. Craig: Numerical Analysis and Optimization: An Introduction to Mathematical Modelling and Numerical Simulation
- ( EN ) KJ Bathe: Numerical methods in finite element analysis , Prentice-Hall (1976).
- ( EN ) J. Chaskalovic, Finite Elements Methods for Engineering Sciences , Springer Verlag, (2008).
- ( EN ) OC Zienkiewicz, RL Taylor, JZ Zhu: The Finite Element Method: Its Basis and Fundamentals , Butterworth-Heinemann, (2005).
Voci correlate
- Analisi agli elementi finiti
- Drilling
- Metodo dei volumi finiti
- Metodo delle differenze finite
- Metodo delle celle
Altri progetti
-
 Wikimedia Commons contiene immagini o altri file su metodo degli elementi finiti
Wikimedia Commons contiene immagini o altri file su metodo degli elementi finiti
Collegamenti esterni
- ( EN ) Metodo degli elementi finiti , su Enciclopedia Britannica , Encyclopædia Britannica, Inc.
- FEM analysis - Comunità virtuale per la simulazione e la modellazione numerica , su it.groups.yahoo.com . URL consultato il 3 maggio 2019 (archiviato dall' url originale il 17 febbraio 2013) .
- Sezione italiana della NAFEMS "The International Association for the Engineering Analysis Community" , su nafems.it .
- Consorzio TCN: Tecnologie per il Calcolo Numerico - Centro Superiore di Formazione , su consorziotcn.it .
- CISM - International Centre for Mechanical Sciences , Udine , su cism.it .
- What is FEA (Metodo degli elementi finiti) , su knol.google.com . URL consultato il 3 maggio 2019 (archiviato dall' url originale l'11 gennaio 2012) .
- Il metodo degli elementi finiti , su calcolostrutture.net .
| Controllo di autorità | Thesaurus BNCF 57806 · LCCN ( EN ) sh85048349 · GND ( DE ) 4017233-8 · BNF ( FR ) cb11938437v (data) · NDL ( EN , JA ) 00574434 |
|---|