Exemplu de traiectorie balistică
Traiectoria este locusul geometric al pozițiilor asumate de centrul de masă al unui corp în mișcare . În mecanica clasică este în general o curbă continuă și derivabilă în spațiul euclidian tridimensional. Poate fi obținut pornind de la legea orară , separându-l în ecuațiile parametrice în timp ale celor trei coordonate extrinseci, în timp ce opusul nu este posibil, deoarece nu există informații despre viteza în traiectorie.
Coordonatele carteziene intrinseci
Poate fi de multe ori util să exprimăm traiectoria într-un mod de auto-referință în triedrul fundamental , compus din vectorii Frenet tridimensionali obținuți succesiv din unitatea vectorială tangentă cu procedura de ortogonalizare Gram-Schmidt :

Un sistem Frenet în trei dimensiuni și planul osculant aferent evidențiat
Versor tangent
Este definit ca aparținând tangentei la traiectorie, adică aproximarea sa la primul ordin , cu față de cea a călătoriei.
- {\ displaystyle {\ bar {t}} = {\ frac {\ mathrm {d} {\ bar {s}}} {\ mathrm {d} s}}.}

Parametrați în mod natural curba {\ displaystyle {\ bar {s}}}  înseamnă să- l dimensionezi în viteză scalară. Acest lucru este util în special pentru coordonatele intrinseci, deoarece vectorul tangent coincide cu viteza vectorului adimensional:
înseamnă să- l dimensionezi în viteză scalară. Acest lucru este util în special pentru coordonatele intrinseci, deoarece vectorul tangent coincide cu viteza vectorului adimensional:
- {\ displaystyle {\ bar {t}} = {\ frac {\ frac {\ mathrm {d} {\ bar {s}}} {\ mathrm {d} t}} {\ frac {\ mathrm {d} s } {\ mathrm {d} t}}} = {\ frac {\ dot {\ bar {s}}} {\ dot {s}}} = {\ dot {\ bar {s}}} ^ {*} }
 ,
,
și acțiunea cinematică [1] S , definită ca intensivă (adică proprie unui corp de masă unitar care călătorește prin el) și numai cinetică, dacă traiectoria este parametrizată în mod natural, ea devine egală cu semi-durata mișcării:
- {\ displaystyle {\ mathcal {S}} ^ {*} (s) = {\ frac {1} {2}} \ int _ {t_ {0}} ^ {t_ {0} + \ Delta t} ({ \ dot {\ bar {s}}} ^ {*}) ^ {2} \, \ mathrm {d} t = {\ frac {1} {2}} \ int _ {t_ {0}} ^ {t_ {0} + \ Delta t} {\ bar {t}} ^ {2} \, \ mathrm {d} t = {\ frac {\ Delta t} {2}}}
 .
.
Versor normal
Acum începe ortogonalizarea: deși totuși{\ displaystyle \ mathrm {d} s}  prin definiție are doar o componentă tangentă, va trebui să avem un alt vector disponibil, pe care îl derivăm din nou intrinsec ca {\ displaystyle \ mathrm {d} ^ {2} {\ bar {s}}}
prin definiție are doar o componentă tangentă, va trebui să avem un alt vector disponibil, pe care îl derivăm din nou intrinsec ca {\ displaystyle \ mathrm {d} ^ {2} {\ bar {s}}}  . In acest punct:
. In acest punct:
- {\ displaystyle {\ bar {n}} = {\ frac {(\ mathrm {d} ^ {2} {\ bar {s}}) _ {n}} {(\ mathrm {d} ^ {2} s ) _ {n}}} = {\ frac {\ mathrm {d} ^ {2} {\ bar {s}} - (\ mathrm {d} ^ {2} s) _ {t} {\ bar {t }}} {| \ mathrm {d} ^ {2} {\ bar {s}} - (\ mathrm {d} ^ {2} s) _ {t} {\ bar {t}} |}} = { \ frac {\ mathrm {d} ^ {2} {\ bar {s}} - (\ mathrm {d} ^ {2} {\ bar {s}} \ cdot {\ bar {t}}) {\ bar {t}}} {| \ mathrm {d} ^ {2} {\ bar {s}} - (\ mathrm {d} ^ {2} {\ bar {s}} \ cdot {\ bar {t}} ) {\ bar {t}} |}}}

De sine {\ displaystyle {\ bar {s}}} este parametrizat în mod natural, vectorul unitar normal este redus la:
- {\ displaystyle {\ bar {n}} = {\ frac {{\ ddot {\ bar {s}}} _ {n}} {{\ ddot {s}} _ {n}}} = {\ frac { {\ dot {\ bar {t}}} - {\ dot {\ bar {t}}} _ {t} {\ bar {t}}} {\ sqrt {1- \ cos ^ {2} \ phi _ {{\ dot {t}}, t}}}} = {\ frac {{\ dot {\ bar {t}}} - {\ dot {\ bar {t}}} _ {t} {\ bar { t}}} {\ sin \ phi _ {{\ dot {t}}, t}}} = {\ frac {{\ ddot {\ bar {s}}} - {\ ddot {\ bar {s}} } _ {t} {\ dot {\ bar {s}}}} {\ sin \ phi _ {{\ ddot {s}}, {\ dot {s}}}}}}
 .
.
Vectororii tangenți și normali generează un plan, numit plan osculant {\ displaystyle \ Pi _ {tn}}  a curbei.
a curbei.
- {\ displaystyle \ Pi _ {tn}: = \ mathrm {Span} (t, n)}

Viteza și accelerația aparțin acestui plan:
- {\ displaystyle \ Pi _ {tn} = \ mathrm {Span} (\ mathrm {d} {\ bar {s}}, \ mathrm {d} ^ {2} {\ bar {s}}) = \ mathrm { Span} ({\ bar {\ dot {s}}}, {\ bar {\ ddot {s}}}) = \ mathrm {Span} ({\ bar {v}}, {\ bar {a}}) }

Versor binormal
Evident, ar fi posibil și în acest caz să-l definim cu ortogonalizare. Cu toate acestea, fiind cazul interesului tridimensional, al treilea element al bazei este, de asemenea, pur și simplu definibil:
- {\ displaystyle {\ bar {b}} = {\ bar {t}} \ times {\ bar {n}} = {\ bar {t}} \ times {\ frac {\ mathrm {d} ^ {2} {\ bar {s}} - (\ mathrm {d} ^ {2} {\ bar {s}} \ cdot {\ bar {t}}) {\ bar {t}}} {| \ mathrm {d} ^ {2} {\ bar {s}} - (\ mathrm {d} ^ {2} {\ bar {s}} \ cdot {\ bar {t}}) {\ bar {t}} |}} = {\ frac {{\ bar {t}} \ times \ mathrm {d} ^ {2} {\ bar {s}} - {\ bar {t}} \ times (\ mathrm {d} ^ {2} { \ bar {s}} \ cdot {\ bar {t}}) {\ bar {t}}} {| \ mathrm {d} ^ {2} {\ bar {s}} - (\ mathrm {d} ^ {2} {\ bar {s}} \ cdot {\ bar {t}}) {\ bar {t}} |}} = {\ frac {{\ bar {t}} \ times \ mathrm {d} ^ {2} {\ bar {s}}} {| \ mathrm {d} ^ {2} {\ bar {s}} - \ mathrm {d} ^ {2} (\ mathrm {d} ^ {2} { \ bar {s}} \ cdot {\ bar {t}}) {\ bar {t}} |}}}

De sine {\ displaystyle {\ bar {s}}} este bineînțeles parametrizat, aceasta se rezumă pur și simplu la:
- {\ displaystyle {\ bar {b}} = {\ frac {{\ bar {t}} \ times {\ dot {\ bar {t}}}} {\ sin \ phi _ {{\ dot {t}} , t}}} = {\ frac {{\ dot {\ bar {s}}} \ times {\ ddot {\ bar {s}}}} {\ sin \ phi _ {{\ ddot {s}}, {\ dot {s}}}}}}

Trebuie adăugat în mod remarcabil că, dacă unitatea vectorială rămâne constantă în sistemul de referință luat în considerare, planul osculant o face și el: mișcarea este apoi definită ca plan .
- {\ displaystyle {\ frac {\ mathrm {d} {\ bar {b}}} {\ mathrm {d} t}} = {\ bar {0}} \ rightarrow {\ frac {\ mathrm {d} \ Pi _ {tn}} {\ mathrm {d} t}} = 0}

Curburi extrinseci
Sunt curburi plane legate de un sistem de referință extern curbei și care nu pot fi definite într-un sistem integral curbei. Rezolvarea ecuației diferențiale vectoriale de ordinul întâi numită formula tridimensională Frenet-Serret :
- {\ displaystyle {\ begin {bmatrix} \ partial {\ bar {t}} \\\ partial {\ bar {n}} \\\ partial {\ bar {b}} \\\ end {bmatrix}} / { \ partial s} = {\ begin {bmatrix} 0 & \ kappa & 0 \\ - \ kappa & 0 & \ gamma \\ 0 & - \ gamma & 0 \\\ end {bmatrix}} {\ begin {bmatrix} {\ bar {t}} \\ {\ bar {n}} \\ {\ bar {b}} \\\ end {bmatrix}}}

În mod formal, teorema fundamentală a curbelor afirmă în cazul tridimensional care a dat curburile extrinseci: {\ displaystyle \ kappa \ land \ gamma: [a, b] \ to \ mathbb {R} ^ {3}} ![{\ displaystyle \ kappa \ land \ gamma: [a, b] \ to \ mathbb {R} ^ {3}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/04742fe5d3b7482a3ac6cc69ada073b9536cbf42) suficient de diferențiat, cu: {\ displaystyle \ kappa (t) \ lor \ gamma (t)> 0}
suficient de diferențiat, cu: {\ displaystyle \ kappa (t) \ lor \ gamma (t)> 0}  (adică unul este suficient), există o singură curbă parametrizată natural care a dat curburi {\ displaystyle \ există! s (\ kappa *, \ gamma *): {\ dot {s}} = 1}
(adică unul este suficient), există o singură curbă parametrizată natural care a dat curburi {\ displaystyle \ există! s (\ kappa *, \ gamma *): {\ dot {s}} = 1}  , cu excepția izometriilor , care se găsește prin rezolvarea ecuației naturale în curburi. Dacă sunt valabile și pentru prima ecuație scalară a formulei lui Frenet:
, cu excepția izometriilor , care se găsește prin rezolvarea ecuației naturale în curburi. Dacă sunt valabile și pentru prima ecuație scalară a formulei lui Frenet:
- {\ displaystyle {\ frac {\ partial {\ bar {s}}} {\ partial s}} = {\ bar {t}}}

- {\ displaystyle {\ frac {\ partial ^ {2} {\ bar {s}}} {{\ partial s} ^ {2}}} = {\ frac {\ partial {\ bar {t}}} {\ partial s}} = \ kappa {\ bar {n}}}

- {\ displaystyle {\ frac {\ partial ^ {3} {\ bar {s}}} {{\ partial s} ^ {3}}} = {\ frac {\ partial (\ kappa {\ bar {n}} )} {\ partial s}} = {\ frac {\ partial \ kappa} {\ partial s}} {\ bar {n}} + \ kappa {\ frac {\ partial {\ bar {n}}} {\ partial s}} = {\ frac {\ partial \ kappa} {\ partial s}} {\ bar {n}} + \ kappa \ gamma {\ bar {b}} - \ kappa ^ {2} {\ bar { t}}}

Dar apoi [2] :
- {\ displaystyle {\ frac {\ partial {\ bar {s}}} {\ partial s}} \ times {\ frac {\ partial ^ {2} {\ bar {s}}} {{\ partial s} ^ {2}}} \ cdot {\ frac {\ partial ^ {3} {\ bar {s}}} {{\ partial s} ^ {3}}} = {\ frac {\ partial {\ bar {s} } \ times \ partial ^ {2} {\ bar {s}} \ cdot \ partial ^ {3} {\ bar {s}}} {{\ partial s} ^ {6}}} = \ kappa {\ bar {b}} \ cdot \ left ({\ frac {\ partial \ kappa} {\ partial s}} {\ bar {n}} + \ kappa \ gamma {\ bar {b}} - \ kappa ^ {2} {\ bar {t}} \ right) = \ kappa ^ {2} \ gamma}

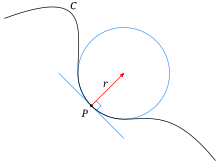
Cercul oscilant
Curbură normală
Din prima ecuație a formulei lui Frenet:
- {\ displaystyle \ kappa = {\ frac {\ partial {\ bar {t}}} {\ partial s}} {\ bar {n}} = {\ frac {\ mathrm {d} s_ {t}} {\ mathrm {d} s}},}

În plus, din relația imediat deasupra care leagă curburile numai în primele două derivate:
- {\ displaystyle \ kappa = \ left | {\ frac {\ partial {\ bar {s}}} {\ partial s}} \ times {\ frac {\ partial ^ {2} {\ bar {s}}} { {\ partial s} ^ {2}}} \ right | \ left (= {\ frac {| \ partial {\ bar {s}} \ times \ partial ^ {2} {\ bar {s}} |} { {\ partial s} ^ {3}}} \ right) = \ left | {\ bar {t}} \ times {\ frac {\ partial {\ bar {t}}} {\ partial s}} \ right | }

Constituie apoi o aproximare de ordinul doi al curbei indirect sub forma cercului osculant Κ, prin definiție:
- {\ displaystyle \ mathrm {K} \ in \ Pi _ {tn}, \ quad \ mathrm {K} '(s) = {\ bar {t}}, \ quad \ rho = r _ {\ mathrm {K} } = {\ frac {1} {\ left | \ kappa \ right |}}.}

Locusul centrelor sale C Γ , numite centre de curbură, este evoluția traiectoriei. În punctele de curbură locală maximă, cercul oscilant nu este niciodată separat de traiectorie.
Înșurubare geodezică
Din ultima ecuație a formulei lui Frenet:
- {\ displaystyle \ gamma = - {\ frac {\ partial {\ bar {b}}} {\ partial s}} {\ bar {n}} = {\ frac {\ mathrm {d} s_ {b}} { \ mathrm {d} s}},}

De asemenea, din relația care leagă curburile în toate cele trei derivate:
- {\ displaystyle \ gamma = {\ frac {\ partial {\ bar {s}} \ times \ partial ^ {2} {\ bar {s}} \ cdot \ partial ^ {3} {\ bar {s}}} {(\ partial {\ bar {s}} \ times \ partial ^ {2} {\ bar {s}}) ^ {2}}} = {\ frac {\ partial ^ {3} s \ quad \ cos \ phi _ {\ partial ^ {3} {\ bar {s}}, \ partial {\ bar {s}} \ times \ partial ^ {2} {\ bar {s}}}} {| \ partial {\ bar {s}} \ times \ partial ^ {2} {\ bar {s}} |}}}

Constituie un indice al neplanarității mișcării, de asemenea sub forma circumferinței șurubului Γ, prin definiție:
- {\ displaystyle \ Gamma \ in \ Pi _ {tb}, \ quad \ Gamma '(s) = {\ bar {t}}, \ quad \ sigma = r _ {\ Gamma} = {\ frac {1} { \ left | \ gamma \ right |}}.}

În mișcarea planului este nulă, deoarece deplasarea nu are o componentă binormală: planul osculant rămâne pentru toată mișcarea unică și, prin urmare, poate fi redenumit plan al mișcării , o mișcare elicoidală care este unică de-a lungul întregii mișcări: oscularea planul se mișcă cu mișcare uniformă , în special drept, deoarece binormalul își menține orientarea constantă.
Ecuația Lancret
O a treia curbură poate fi, de asemenea, definită, o sinteză a celor precedente, deoarece este definită ca:
- {\ displaystyle \ xi = {\ frac {\ mathrm {d} s_ {n}} {\ mathrm {d} s}}}

Evident, teorema lui Pitagora este valabilă datorită ortogonalității bazei (triedrul fundamental) [3] :
- {\ displaystyle {\ mathrm {d} s_ {n}} ^ {2} = {\ mathrm {d} s_ {t}} ^ {2} + {\ mathrm {d} s_ {b}} ^ {2} }

Și astfel ecuația Lancret susține:
- {\ displaystyle \ xi ^ {2} = \ kappa ^ {2} + \ gamma ^ {2}}
 .
.
Notă
- ^ numele este justificat deoarece geodezice pentru masa constantă sunt ecuațiile Lagrange
- ^ Coxeter 1969, p. 322
- ^ Kreyszig, E. Geometrie diferențială. New York: Dover, p. 47, 1991
Elemente conexe
Alte proiecte



 Wikționarul conține lema dicționarului „ traiectorie ”
Wikționarul conține lema dicționarului „ traiectorie ” Wikimedia Commons conține imagini sau alte fișiere pe traiectorie
Wikimedia Commons conține imagini sau alte fișiere pe traiectorie