Izometria avionului
Această intrare sau secțiune despre geometrie nu citează sursele necesare sau cei prezenți sunt insuficienți . |
În matematică și în special în geometrie , izometria (sau transformarea rigidă ) este definită ca o transformare care nu modifică distanțele dintre puncte (și, în consecință, amplitudinile unghiurilor).
Oferit formal un spațiu peste care se definește o distanță , o functie este dacă și numai dacă izometrie avem asta





Setul de izometrii care acționează pe un plan euclidian este un grup necomutativ . A fost studiat pe larg, deoarece conține transformări foarte intuitive utilizate, de exemplu, în teoria teselărilor plane .
Catalogare
Izometriile planului pot fi împărțite în patru clase:
- rotații , dintre care simetriile centrale sunt un caz particular
- traduceri
- simetrii axiale , numite și reflexe
- antitraslazioni , numite și glissosimmetrie, glissoriflessioni sau simetrii cu alunecare
Deoarece antitraducția este definită ca fiind compoziția unei simetrii axiale și o translație a direcției paralelă cu axa de simetrie, se poate observa că simetriile axiale pot fi văzute ca cazuri particulare de antitraduții, în care componenta de traducere are modulul 0.

Rotație
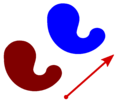
Traducere
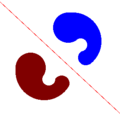
Simetrie axială

Antitraducție




Traducerile formează un grup comutativ, precum și rotațiile unui centru fix. Rotațiile, pe de altă parte, nu formează un grup, deoarece compoziția a două rotații este o rotație sau o translație.
Inversarea izometriilor
Izometriile pot fi, de asemenea, clasificate în izometrii inversoare (sau inverse) și neinversibile (sau directe); primele includ simetrii axiale și antitraducții, în timp ce cele din urmă sunt rotații și translații.
Adjectivul inversor (uneori înlocuit cu invers , care poate fi totuși o sursă de neînțelegere, deoarece poate fi confundat cu funcția inversă a unei izometrii date) ne poate face să înțelegem pe ce se bazează această distincție: dat un poligon G cu laturile ale căror vârfuri sunt numerotate de la 1 la n în sensul acelor de ceasornic, imaginea sa printr-o izometrie inversantă va avea vârfurile numerotate în sens invers acelor de ceasornic; dacă, pe de altă parte, izometria nu este inversă, ordinea vârfurilor nu se schimbă.

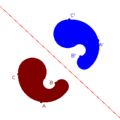
Simetria este o izometrie inversă
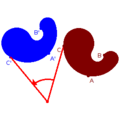
Rotația este o izometrie fără inversare


Este ușor de observat că compoziția oricărui număr de izometrii fără inversare este o izometrie care nu inversează; cu alte cuvinte, izometriile care nu se inversează formează un grup cu operația de compunere.
Inversarea izometriilor, pe de altă parte, nu formează un grup; de fapt, compoziția oricărui număr par de izometrii inversoare dă o izometrie neinversivă. Mai mult, este evident că compoziția oricărei izometrii inversoare cu orice izometrie neinversivă dă o izometrie inversă.
Toate aceste considerații nu depind de ordinea în care se realizează compoziția.
Generarea prin reflexii
O caracteristică importantă a izometriilor este că fiecare dintre ele poate fi generată de până la trei reflecții; în special, două caracterizează rotațiile și translațiile, trei antitraducțiile. Din aceasta rezultă că fiecare izometrie este, de asemenea, o compoziție a unei simetrii axiale și a unei isometrii care nu se inversează și, eventual, a uneia dintre ele.
Demonstrarea acestui fapt este destul de simplă și este constructivă (adică nu numai că ne spune că aceste două izometrii există, ci ne permite să găsim un posibil cuplu).

În primul rând observăm că, date două izometrii , dacă există nealiniat și astfel încât:



asa de . Acest lucru este echivalent cu a spune că, dacă o izometrie are trei puncte neliniate ca puncte fixe, atunci este identitate.

Acest fapt poate fi ușor verificat observând că dacă intersecția a trei cercuri conține cel puțin două puncte distincte , apoi centrele lor sunt aliniate (deoarece sunt pe axa segmentului ). Prin urmare, să presupunem că este absurd că există X astfel încât , și ei sunt circumferințele respectiv de centru și raza . Cum o izometrie păstrează distanțele, așa să fie acea trebuie să aparțină amândouă celor trei cercuri și, prin urmare, intersecției lor. Prin urmare acestea sunt aliniate, iar acest lucru contrazice presupunerile noastre.









Atunci sunăm izometria pe care vrem să o construim și luăm 3 puncte . Lasa-i sa fie .


Ca prim pas, putem aplica o traducere H astfel încât H (A) = A '(această traducere există și este unică).
În acest moment, trebuie să distingem cazul în care izometria pe care dorim să o construim este inversă sau nu:
- dacă se inversează, vom aplica o reflexie cu axa de simetrie pe axa segmentului
- dacă nu inversează, vom aplica o rotație a centrului A și a unghiului


În ambele cazuri, avem că imaginea lui A rămâne A '(este un punct fix), iar cea a lui B devine B'. În ceea ce privește C, din nou, pentru proprietatea izometriei de a păstra distanțele, aceasta trebuie să se afle pe intersecția cercului cu centrul A 'și raza AC și cea a centrului B' și a razei BC. Este ușor de verificat că această intersecție admite doar două puncte și că cele două triunghiuri compuse din AB și unul dintre aceste două puncte au o orientare diferită.
Reamintind, așadar, că o traducere compusă într-o reflecție va fi inversă, în timp ce o traducere compusă într-o rotație va fi neinversibilă, avem că în ambele cazuri traducerea obținută este în mod necesar cea căutată.

Generarea unei izometrii inversoare

Generarea unei izometrii fără inversare


Construirea izometriilor



Demonstrația tocmai dată demonstrează nu numai că compoziția reflexiilor, rotațiilor și translațiilor generează toate izometriile planului, ci și faptul că compoziția numai a rotațiilor și a translațiilor (care sunt, să ne amintim, neinversive) generează toate izometrii neinversoare.
Neinversibil (prin rotații)
Există un rezultat mai puternic: aceleași translații pot fi generate doar cu compoziția rotațiilor, ceea ce implică faptul că rotațiile singure generează toate izometriile care nu se inversează.
De fapt, să presupunem că vrem să construim traducerea de direcție și modul . Este orice punct, e imaginea lui. Va fi suficient să aplicați două rotații respectiv a centrului și unghiul astfel încât:






- dat C mijlocul segmentului AA ', să fie AP = PC = CQ = QA'
- și sunt una de ambele părți ale liniei care trece Și
- ordinea compoziției este dată de versul din




Inversare și non-inversare (prin simetrii axiale)
Următoarele construcții arată cum se generează traduceri și rotații din reflexii:
- Traduceri: să presupunem că vrem să construim traducerea direcției și modul . Va fi suficient să aplicați două reflecții de ax respectiv astfel încât:

- Și sunt ambele perpendiculare pe (și, prin urmare, paralel unul cu celălalt)
- distanța dintre cele două axe este
- ordinea de compoziție a celor două simetrii este dată de direcția lui



- Rotații: să presupunem că dorim să construim rotația centrală și colț . Va fi suficient să aplicați două reflecții de ax respectiv astfel încât:


- Și se intersectează în
- unghiul format de Și este
- ordinea compoziției celor două simetrii este dată de sensul în care măsurăm unghiurile (adică de obicei în sens invers acelor de ceasornic)

Descriere formală
Fiind transformări afine deosebite, izometriile planului pot fi reprezentate ca multiplicare printr-o matrice urmată de suma unui vector.

Să ne uităm la câteva cazuri speciale:
- rotație centrată în originea unghiului poate fi reprezentat printr-o matrice,

- în mod similar, reflexia cu o axă care trece prin origine și formează un unghi cu axa absciselor,

Ansamblul tuturor reflexiilor și rotațiilor planului care lasă originea fixă, echipat cu operația de compoziție a transformărilor, constituie un grup .
Grupul are ca identitate Rot (0) . Fiecare rotire rotativă (φ) are ca rotire inversă (-φ) . Fiecare reflecție Ref (θ) este inversă de la sine (este o involuție). Setul este închis în raport cu operația de compoziție, care este asociativă, deoarece produsul matricelor este asociativ, adică compoziția transformărilor este asociativă.
Rețineți că atât Ref (θ), cât și Rot (θ) sunt reprezentate de matrici ortogonale . Toate aceste matrice au un factor determinant a cărui valoare absolută este unitatea. Matricile de rotație au determinant +1, în timp ce matricile de reflecție au determinant -1.
Ansamblul tuturor matricilor ortogonale bidimensionale cu prevăzut cu înmulțirea între matrici formează grupul ortogonal în dimensiunea 2, uneori notat O (2) .

- în cele din urmă, traducerea generică poate fi reprezentată prin suma unui vector, ale cărui două componente sunt componentele traducerii de-a lungul celor două axe.
Compoziții de rotații și reflexii
Două reflecții
Vedem că compoziția a două reflexii M 1 și M 2 este în general o rotație: fie L 1 și L 2 să fie axele lor. Reflecția M 1 transformă un punct generic P în imaginea sa P ′ aparținând semiplanului delimitat de L 1 care nu conține P (dacă P aparține lui L 1 P ′ = P ). M 2 transformă P ′ în imaginea sa P ′ ′ în jumătatea planului delimitat al liniei L 2 care nu conține P ′ ′ (și dacă P ′ aparține lui L 1 P ′ ′ = P ′ ).
Dacă liniile L 1 și L 2 se intersectează într-un punct pe care îl notăm O și formăm un unghi θ , atunci liniile care trec prin O și, respectiv, prin punctul P și punctul P ′ ′ formează un unghi 2θ în O ; cu alte cuvinte unghiul POP ′ ′ măsoară 2θ. Deci compoziția celor două reflexii este o rotație a unghiului 2θ.
În formule,

Dacă în schimb L 1 și L 2 sunt linii paralele, compoziția lui M 1 și M 2 este translația în direcția ortogonală către cele două linii pentru distanța egală cu dublul distanței dintre L 1 și L 2 (o astfel de translație poate fi considerată o rotație în jurul punctului la infinit în direcția celor două linii).
Două rotații
Este ușor să ne dăm seama că câteva rotații în jurul aceluiași punct O sunt echivalente cu o altă rotație în jurul acelui punct. Compoziția a două rotații cu centre diferite este mai complicată.
În formule,

Rotație și reflecție
Compoziția unei reflecții și a unei rotații, sau a unei rotații și a unei reflecții este echivalentă cu o reflecție. Se observă că compoziția unei rotații și a unei reflexii nu este comutativă ),
În formule:


Aceste ecuații pot fi dovedite prin simplul calcul al produselor matricilor și aplicarea identităților trigonometrice .