O curbă este o funcție continuă{\ displaystyle f \ colon I \ to \ mathbb {R} ^ {m}} , unde este {\ displaystyle I \ subset \ mathbb {R}} este o gamă de numere reale . De sine {\ displaystyle I = [a, b]} , cu {\ displaystyle a <b} , {\ displaystyle f (a)} se numește punctul de plecare e {\ displaystyle f (b)} punctul final, în timp ce variabila din acest interval este de obicei notată cu litera {\ displaystyle t} iar notația este utilizată pentru funcție {\ displaystyle f (t)} . În sprijinul{\ displaystyle f} ne referim la imaginea acelei funcții {\ displaystyle \ operatorname {Im} f} .
Asuma ca {\ displaystyle f} este o funcție diferențiată suficient de regulată sau o funcție care are derivate continue de un ordin suficient de ridicat; cere, de asemenea, ca prima sa derivată {\ displaystyle f '(t)} este un vector care nu este niciodată zero pe întregul interval {\ displaystyle I} .
O reparameterizare a {\ displaystyle f} este o altă curbă {\ displaystyle g} astfel încât:
{\ displaystyle g = f \ circ p}
unde este {\ displaystyle p \ colon J \ to I} este o bijecție diferențiată cu derivată întotdeauna pozitivă (și deci în creștere ) e {\ displaystyle J} este un interval de reali cu care ar putea coincide {\ displaystyle I} . În acest caz curbele {\ displaystyle f} Și {\ displaystyle g} , deși sunt descrise cu parametrizări diferite, acestea sunt concepute ca echivalente.
Lungimea unei curbe {\ displaystyle f} definit pe un interval închis {\ displaystyle I = [a, b]} este furnizat de:
{\ displaystyle L (f) = \ int _ {a} ^ {b} \ vert f '(t) \ vert dt}
Lungimea unei curbe nu se modifică dacă este reparameterizată. În plus, este posibil să se definească abscisa curbiliniară ca:
{\ displaystyle L (t) = \ int _ {a} ^ {t} \ vert f '(t) \ vert dt}
Exemplu
Luați în considerare că domeniul de definiție al curbei este de formă {\ displaystyle [0, T]} și că un corp punctat {\ displaystyle P} parcurge curba în timp ce timpul variabil {\ displaystyle t} variază în intervalul de timp de la 0 la {\ displaystyle T} ; de aceea avem un model cinematic al curbei. Lungimea curbei parcurse de corpuscul de la instant 0 la instant {\ displaystyle t} Și:
{\ displaystyle s (t) = \ int _ {0} ^ {t} \ vert f '(u) \ vert du}
Funcția în continuă creștere {\ displaystyle s (t)} stabilește o bijecție între intervale {\ displaystyle [0, T]} Și {\ displaystyle [0, L]} și duce la o reparameterizare a curbei. Scris:
{\ displaystyle f (t) ~ = ~ f_ {0} (s (t))}
se realizează așa-numita parametrizare a lungimii arcului{\ displaystyle f_ {0}} a curbei. Această parametrizare, în termeni cinematici, poate fi citită ca mișcarea unui corp asemănător unui punct care trece prin curbă cu o viteză constantă egală cu {\ displaystyle 1} :
{\ displaystyle \ vert f_ {0} '(s (t)) \ vert = 1 \ qquad (\ forall t \ in I)}
Această parametrizare a curbei este singura care are viteza constantă egală cu {\ displaystyle 1} . Deși este adesea dificil de calculat, este util pentru a demonstra cu ușurință unele teoreme.
Sistem Frenet
Un sistem Frenet este un sistem de referință mobil al {\ displaystyle n}vectori ortonormali{\ displaystyle \ mathbf {e} _ {1} (t), \ ldots, \ mathbf {e} _ {n} (t) \, \!} dependent de {\ displaystyle t} , util pentru descrierea comportamentului local al curbei în {\ displaystyle f (t)} .
Să presupunem că derivatele {\ displaystyle f '(t), \ ldots, f ^ {(n)} (t) \, \!} formează o bază și, prin urmare, sunt liniar independenți . În acest caz, sistemul Frenet este definit pornind de la această bază prin intermediul procedurii de ortonormalizare Gram-Schmidt .
Sistemul Frenet și curburile generalizate nu depind de parametrizarea aleasă.
2 dimensiuni
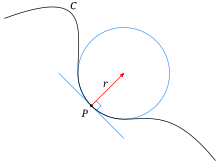
Cercul oscilant
În plan, primul vector Frenet {\ displaystyle \ mathbf {e} _ {1} (t)} este vectorul tangent{\ displaystyle {\ hat {\ mathbf {T}}}} la curba valorii {\ displaystyle t} parametrului, în timp ce vectorul {\ displaystyle \ mathbf {e} _ {2} (t)} , numit vector unitate normal{\ displaystyle {\ hat {\ mathbf {N}}}} este vectorul normal a {\ displaystyle \ mathbf {e} _ {1} (t)} și indică spre centrul cercului (are aceeași direcție ca raza).
Cercul oscilant este cercul tangent la {\ displaystyle \ mathbf {e} _ {1} (t)} și raza {\ displaystyle r} . Cercul oscilant aproximează curba în jurul valorii {\ displaystyle t} a parametrului „până la ordinea a doua”: adică are aceeași primă și a doua derivată a {\ displaystyle f} în sens. Curbura :
{\ displaystyle k (t) = \ chi _ {1} (t)}
indică deplasarea curbei de la linia dreaptă tangentă. Reciprocul, corespunzător razei cercului oscilant din {\ displaystyle t} , se numește raza de curbură :
{\ displaystyle r (t) = {\ frac {1} {k (t)}}}
De exemplu, un cerc de rază {\ displaystyle r} are curbură constantă {\ displaystyle k = 1 / r} , în timp ce o linie dreaptă are curbură zero.
3 dimensiuni
Un sistem Frenet în trei dimensiuni și planul oscilant aferent evidențiat
În spațiul tridimensional, vectorii Frenet sunt numiți triade intrinseci , în timp ce curburile generalizate se numesc curbură și torsiune .
Versor tangent
Versorul tangent{\ displaystyle {\ hat {\ mathbf {T}}}} este primul vector Frenet {\ displaystyle \ mathbf {e} _ {1}} , care este definit ca:
Prin urmare, va fi posibilă rescrierea derivatei în funcție de lungimea arcului:
{\ displaystyle f '(t) = (L)' {\ hat {\ mathbf {T}}}}
De sine {\ displaystyle f} este parametrizat în funcție de lungimea arcului, aceasta ia o valoare unitară, astfel încât relația este pur și simplu redusă la
{\ displaystyle {\ hat {\ mathbf {T}}} = f '(t)}
Din relațiile anterioare obținem o relație suplimentară între raportul dintre lungimea arcului și unitatea vectorială tangentă, de fapt:
{\ displaystyle {\ frac {\ mathrm {d} f '} {\ mathrm {d} L}} = {\ hat {\ mathbf {T}}}}
Versor normal
Vectorul unitar normal{\ displaystyle {\ hat {\ mathbf {N}}}} este al doilea vector Frenet care măsoară cât diferă curba de o linie dreaptă; este definit ca:
Vectorul unitar binormal{\ displaystyle {\ hat {\ mathbf {B}}}} este al treilea vector Frenet {\ displaystyle \ mathbf {e} _ {3} (t)} , care este ortogonală cu planul osculant, definit cu produsul vector pur și simplu ca:
Prima curbură generalizată {\ displaystyle \ chi _ {1} (t)} se numește pur și simplu curbura lui {\ displaystyle f} în {\ displaystyle t} , și este dat de
Reciprocitatea curburii la punct {\ displaystyle t} este raza de curbură{\ displaystyle \ rho (t) = \ left [k (t) \ right] ^ {- 1}} ; în plus, o curbă are torsiune zero dacă și numai dacă este o curbă plană .
Formule Frenet-Serret
Formulele Frenet-Serret sunt ecuații diferențiale obișnuite de ordinul întâi, a căror soluție este sistemul Frenet care descrie curba. Coeficienții ecuației diferențiale sunt dați de curburile generalizate {\ displaystyle \ chi _ {i}} .
2 dimensiuni
{\ displaystyle {\ begin {bmatrix} \ mathbf {e} _ {1} '(t) \\\ mathbf {e} _ {2}' (t) \\\ end {bmatrix}} = {\ begin { bmatrix} 0 & k (t) \\ - k (t) & 0 \\\ end {bmatrix}} {\ begin {bmatrix} \ mathbf {e} _ {1} (t) \\\ mathbf {e} _ {2} (t) \\\ end {bmatrix}}}
3 dimensiuni
{\ displaystyle {\ begin {bmatrix} \ mathbf {e} _ {1} '(t) \\\ mathbf {e} _ {2}' (t) \\\ mathbf {e} _ {3} '( t) \\\ end {bmatrix}} = {\ begin {bmatrix} 0 & k (t) & 0 \\ - k (t) & 0 & \ tau (t) \\ 0 & - \ tau (t) & 0 \\\ end {bmatrix}} {\ begin {bmatrix} \ mathbf {e} _ {1} (t) \\\ mathbf {e} _ {2} (t) \\\ mathbf {e} _ {3} (t) \ \\ end {bmatrix}}}
În geometria diferențială a curbelor, viteza unghiulară și vitezaareolară sunt viteza cu care raza vectorială a unui punct care se deplasează de-a lungul unei curbe mătură un unghi și, respectiv, o suprafață . Cei doi vectori sunt paraleli și au aceeași direcție ca vectorul binormal.
Bibliografie
( EN ) Erwin Kreyszig, Geometrie diferențială , Publicații Dover, New York, 1991, ISBN 0-486-66721-9 . Capitolul II este un tratament clasic al teoriei curbelor în 3 dimensiuni.


![{\ displaystyle I = [a, b]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6d6214bb3ce7f00e496c0706edd1464ac60b73b5)















![[0, T]](https://wikimedia.org/api/rest_v1/media/math/render/svg/35ccef2d3dc751e081375d51c111709d8a1d7ac6)




![[0, L]](https://wikimedia.org/api/rest_v1/media/math/render/svg/53e3bfad6c2b8297e8c8d2e84ce8f869d69b0d86)
































![{\ displaystyle \ rho (t) = \ left [k (t) \ right] ^ {- 1}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5ffb40f1364a94c4ae28c8594899b91b63dfa037)




![\ chi _ {i} \ colon [a, b] \ to \ mathbb {R} ^ {n}, \ i = 1, \ ldots, n](https://wikimedia.org/api/rest_v1/media/math/render/svg/003c68e4b2d1824f35e0fcfb3a10406d3f06af39)
