Elicopter

Elicopterul (din greacă : ἕλιξ [ helix ], turlă, spirală și πτερόν [ pterón ], aripă ) este un tip de aeronavă folosit pentru transportul oamenilor și a lucrurilor în scopuri civile și / sau militare. În general, este echipat cu unul sau mai multe motoare cu piston sau turbină care acționează un complex de lame care îi permit să se ridice și să cadă vertical, să rămână staționare în zbor, să se deplaseze lateral, înapoi sau înainte și să zboare similar cu un avion. flexibilitate și manevrabilitate.
Mai tehnic, elicopterul este caracterizat de o aripă rotativă, numită rotor , care permite decolarea și aterizarea verticale fără a fi nevoie de o pistă și un punct fix , adică un zbor susținut la viteză zero și altitudine constantă, care reprezintă, prin urmare, principalele avantaje față de avion în multe situații de patrulare și de urgență. Comparativ cu un avion, atinge viteze medii și altitudini mai mici (până la 300 km / h și nu mai mult de 6.000 m altitudine) și are o rază de acțiune mai mică, permițând astfel trasee mai scurte. Astăzi reprezintă cea mai răspândită categorie de aeronave după avion, folosită pentru multe utilizări civile și militare.
Elicopterele nu sunt aeronave strict vorbitoare , deși uneori sunt denumite în mod eronat ca atare; de fapt aparțin unei alte categorii de aerodine , numite aerogiri .
Istorie
Epoca veche și modernă



Prima dovadă istorică a unui obiect capabil să se ridice vertical în aer datorită rotației unei elice se întoarce în China în secolul al V-lea î.Hr.: o jucărie construită din lemn ușor de bambus și constă dintr-o ' elice cu două lame conectate la o un băț care, făcut să se rotească rapid între palmele mâinilor sau prin tracțiunea unui cablu, a făcut ca acesta să se ridice în zbor. [1] Aceste mici jucării, încă folosite în Japonia, unde iau numele de taketombo , au ajuns în Europa probabil în secolul al XV-lea, deoarece apar în unele picturi începând cu 1463 . [2]
Aproximativ douăzeci de ani mai târziu, Leonardo da Vinci , într-un desen de aproximativ 1480 raportat în Codex Atlanticus , [3] schițează proiectul unui " șurub aerian " care, în intențiile sale, ar fi trebuit să "înșurubeze" în aer, exploatând densitatea acestuia similar cu ceea ce face un șurub care pătrunde în lemn. Mașina a fost imaginată ca un vierme cu o bază cu un diametru de aproximativ 5 metri, mișcat de forța musculară a patru bărbați și alcătuit dintr-o structură din lemn acoperită cu o cârpă de in amidonată. [4] Cu toate acestea, nu există nicio dovadă că Leonardo a construit efectiv mașina pe care și-a imaginat-o, care va rămâne, prin urmare, una dintre numeroasele intuiții teoretice ale activității multifacetate a celebrului inventator [5] sau, mai degrabă, anticiparea ante-litteram a o elice de aeronave . [6]
În iulie 1754, inventatorul rus Mihail Lomonosov a arătat Academiei Ruse de Științe un mic tandem bimotor alimentat de un arc și destinat ca un mijloc de a aduce instrumentele meteorologice la altitudine. [7] În 1783, la doar un an după ascensiunea fraților Montgolfier într-un balon, naturalistul Christian de Launoy , cu ajutorul mecanicului său Bienvenu, a creat și a prezentat Academiei de Științe din Paris o jucărie demonstrativă care funcționa cu două contoare. -rotoarele rotative realizate cu pene de curcan mișcate de o bandă elastică din metal. [7] [8] [9] Ideea elicelor anti-rotative a fost acceptată ca brevet pentru prima dată în 1859 ca răspuns la cererea englezului Henry Bright , care a fost urmată în 1863 de o înregistrare similară a brevetului în Marea Britanie și Franța de vicontele Gustave Ponton d'Amecourt . Acest pionier francez de zbor a construit un model cu o mașină cu aburi , [8] care nu a putut să decoleze în timpul expoziției aeriene de la Londra din 1868 , dar validitatea proiectului a fost verificată atunci când o versiune cu rotorii mișcată de benzi de cauciuc. [10] D'Amecourt și-a numit modelele " hélicoptères " și, prin urmare, este considerat inventatorul termenului. [7]
În 1877 , inginerul italian Enrico Forlanini a reușit să ridice un model de elicopter cu o greutate de 3,5 kg, cu două rotoare coaxiale cu două lame co-rotative până la o înălțime de aproximativ 13 metri folosind un motor cu abur alimentat de un cazan mic adus la presiune ridicată printr-o sobă. care a format baza de pe care a zburat modelul în sus și care a rămas pe pământ pentru a nu-l cântări. [9]
Prima jumătate a secolului XX
În 1901, inventatorul slovac Ján Bahýľ a construit un model de elicopter alimentat de un motor cu ardere internă care a reușit să ridice 0,5 metri și care, la perfecționare, s-a ridicat la aproximativ 4 metri de sol la 5 mai 1905. un zbor de 1 500 de metri. [7]
În 1906, doi frați francezi, Jacques Breguet și Louis Charles Breguet , cu colaborarea profesorului Charles Richet, au fost primii din lume care au aplicat lamele aerodinamice pe un prototip de elicopter, creând Gyroplane No.1, alimentat de un motor Antoinette de 45 CP care a acționat prin intermediul unei transmisii cu lanț patru rotoare plasate la cele patru vârfuri ale unei structuri în formă de X și echipate fiecare cu patru biplane. La o dată incertă între 14 august și 29 septembrie 1907, aeronava ciudată a reușit să se ridice la 60 cm de la sol cu un pasager la bord timp de aproximativ un minut, dar imposibilitatea de a se deplasa în zbor controlat din cauza lipsei oricărui dispozitiv de comandă, ceea ce presupunea prezența unui om cu un crampon lung la fiecare dintre cele patru colțuri ale mașinii, pentru ao menține în tăietură și pentru a preveni răsturnarea sa, a însemnat că zborurile Gyroplane nr. 1 au fost considerate primele zboruri cu oameni la bord elicopter, dar nu primele zboruri gratuite ale unui elicopter. [7] [11]
Primul zbor gratuit al unui elicopter este în general recunoscut mașinii fabricate de un alt inventator francez (de origine română), Paul Cornu care, în colaborare cu fratele său Jacques și tatăl său Jules, a proiectat și a construit elicopterul Cornu , un avion de 6 metri lung, capabil să găzduiască un pasager în mijloc și echipat cu două rotoare contra-rotative la capetele setate în rotație de un motor Antoinette de 24 de cai putere. [7] [9] [12] La 13 noiembrie 1907, la Lisieux , Cornu a fost primul om care a efectuat un zbor liber controlat zburând cu 30 cm timp de aproximativ 20 de secunde, fără a fi nevoie de constrângeri de siguranță și de episodul în care este recunoscut ca primul zbor gratuit efectiv al unui elicopter cu pasager. Mai târziu, Cornu a mai făcut câteva zboruri, până la o înălțime de aproape doi metri, dar în realitate soluțiile adoptate nu au permis un control eficient al aeronavei, astfel încât orice experiment suplimentar a fost abandonat. [13]

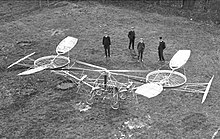
În timpul primului război mondial , inginerul maghiar Theodore von Kármán , împreună cu locotenentul său asistent Wilhelm Zuroveć și maiorul Stephan von Petrócz , au construit PKZ 1 pentru Armata Imperială Austro-Ungară Imperială , o mașină formată dintr-o structură triunghiulară simplă . tuburi de oțel cu patru elice orizontale din lemn portante, două dreptaci și două stângaci, acționate de un motor electric de 190 CP alimentat de cabluri pe care mașina le-a ridicat împreună cu corzile de legare. După patru zboruri de testare, mașina a ieșit din funcțiune din cauza unei defecțiuni a motorului și a fost înlocuită de cel mai mare PKZ 2 , conceput ca o platformă de observare fixă pentru artilerie pentru a înlocui baloanele frânate . Aeronava a fost echipată cu două elice coaxiale contra-rotative cu un diametru de 6 metri, acționate de trei motoare Gnome de 100 CP, era lipsită de orice sistem de control și era menită să se ridice pe verticală, fiind legată de pământ de frânghii. Deasupra elicelor ar putea fi montată o structură cilindrică din lemn pentru observator. [14] Construcția prototipului a început la sfârșitul anului 1917, iar elicopterul și-a făcut primul zbor la 2 aprilie 1918 lângă Budapesta . În timpul celor peste treizeci de zboruri ulterioare, mașina, fără pasageri, a atins o înălțime maximă de aproximativ cincizeci de metri (departe de cei 500 ceruți de armata imperială), reușind să rămână în zbor până la o oră. La 10 iunie 1918, în fața unei comisii de examinare compuse din autorități militare, aeronava s-a prăbușit probabil din cauza unei defecțiuni mecanice, deteriorându-se grav. Comisia a decis să nu continue proiectul, care a fost deci suspendat.

La începutul anilor 1920 , rezidentul argentinian în Europa, Raúl Pateras-Pescara de Castelluccio, a dat una dintre primele demonstrații de control al pasului colectiv și ciclic: lamele rotorului coaxial contra-rotativ ale prototipului său puteau fi răsucite la capete prin cabluri. pentru a mări sau micșora forța produsă. Proiectul său a inclus, de asemenea, o înclinare de câteva grade înainte a butucului rotorului, astfel încât să permită aeronavei să se deplaseze înainte fără a fi nevoie să utilizeze o elice separată ca în avioane. Elicopterul, numit „nr. 1”, a fost testat în ianuarie 1924, dar s-a dovedit a fi insuficient și incapabil să-și ridice propria greutate. Guvernul britanic a finanțat cercetări suplimentare la Pescara, ceea ce a dus la crearea modelului „Nr. 3” care, echipat cu un motor radial de 250 CP, în ianuarie 1924 a reușit să ridice de la sol rămânând în zbor timp de aproximativ zece minute. Pateras-Pescara a putut, de asemenea, să demonstreze principiul autorotației . [7] [15] [16]

La 14 aprilie 1924, francezul Étienne Oehmichen a stabilit primul record mondial recunoscut de Fédération Aéronautique Internationale (FAI), pilotând elicopterul cu patru rotori pe 360 de metri. La 18 aprilie 1924, Pescara a doborât recordul Oemichen, acoperind distanța de 736 metri în 4 minute și 11 secunde, cu o viteză de aproximativ 13 km / h, menținând o înălțime de aproximativ 6 m (aproximativ 1,8 m). Record de distanță care a fost revendicat din nou de Oehmichen pe 4 mai, când, cu modelul său nr. 2, a parcurs distanța de 1,69 km în 14 minute zburând la o înălțime de 15 metri. [7] [17] Pe 4 mai, Oehmichen a stabilit primul record de 1 km în circuit închis pentru elicoptere, acoperind distanța în 7 minute și 40 de secunde cu modelul său "nr. 2". [7] [18]
În aceeași perioadă în Statele Unite, la Daytona, inginerul și matematicianul român Gheorghe Botezatu a construit un elicopter pentru Serviciul Aerian al Armatei Statelor Unite , dar, în ciuda faptului că a primit rezultate bune confirmate și de presa mondială, armata a anulat programul în 1924. și prototipul a fost abandonat, pentru a prezenta un alt elicopter, a cărui denumire era GB5 și așa cum este înregistrat în cartea „Istoria aeronautică”, publicată la Paris în 1932, a fost „cel mai perfect elicopter vintage”. În 1928, inginerul aeronautic maghiar Oszkàr Asbóth a construit un prototip de elicopter care a reușit să zboare de cel puțin 182 ori cu o durată maximă de zbor de 53 de minute. [7]
Albert Gillis von Baumhauer , inginer aeronautic olandez, a început să lucreze la elicoptere în 1923. Primul său prototip a zburat (de fapt tocmai a decolat și a planat) pe 24 septembrie 1925, cu căpitanul Floris Albert la comenzi. Van Heijst al olandezilor Armă aeriană a armatei. Elicopterul a fost echipat cu un rotor principal și un rotor cuplu de coadă acționat de un motor independent. Mașina a fost instabilă și nu a urmat și a ajuns să fie distrusă într-un accident. Mașina lui Von Baumhauer a fost echipată cu un control al pasului ciclic și colectiv pentru care a obținut un brevet de invenție de la Ministerul Aviației britanic în 1927 cu numărul 265 272. [7]

În 1925, inginerul italian Corradino D'Ascanio și baronul Pietro Trojani au fondat Compania D'Ascanio-Trojani care și-a propus să construiască un elicopter cu adevărat funcțional. După primele două prototipuri D'AT1 și D'AT2 , care abia au reușit să se ridice de la sol, a fost construit D'AT3 , o mașină relativ mare în comparație cu celelalte prototipuri, echipată cu două rotoare coaxiale și controrotante. Controlul s-a făcut folosind aripi auxiliare și mici suprafețe de control controlabile de pe marginea din spate a lamelor, [19] o idee folosită ulterior de alți designeri de elicoptere, inclusiv Bleeker și Kaman. Trei elice mici montate pe structură au fost, de asemenea, folosite pentru a controla rola, pasul și girația pe cele trei axe. Pilotat de maiorul Marinello Nelli pe aeroportul Ciampino din Roma , D'AT3 a îmbunătățit ușor înregistrările FAI ale timpului obținându-le pentru înălțime (17,4 m ), durată (8 minute și 45 de secunde ) și distanță (1078 m), dar s-a întors să fie primul prototip al unui elicopter cu adevărat funcțional și utilizabil. Cu toate acestea, autoritățile militare nu au permis inventatorului să acceseze finanțare publică, ceea ce este esențial pentru dezvoltarea prototipului. În 1932, compania D'Ascanio-Trojani, după epuizarea resurselor sale financiare, s-a despărțit și inginerul D'Ascanio a fost angajat de Piaggio pentru proiectarea elicelor. Compania i-a permis proiectantului abruzzez, în 1939, să construiască două prototipuri de elicoptere, „ PD1 ” și „ PD2 ”, care au fost distruse în 1943, din cauza bombardamentului aliat asupra fabricilor Pontedera . [19] [20]
În Uniunea Sovietică, doi ingineri aeronautici, Boris N. Yuriev și Alexei M. Cheremukhin, care lucrau la Tsentralniy Aerogidrodinamicheskiy Institut (TsAGI, institutul central de aerohidrodinamică), au construit și au zburat TsAGI 1-EA , un elicopter bazat pe un structură tubulară deschisă, un rotor principal cu patru lame și două perechi de rotoare duble cu diametrul de 1,8 metri cu funcție anti-cuplu, unul pe nas și celălalt pe coadă. Alimentat de două motoare M-2, o copie rusă a motorului rotativ Gnome Monosoupape din Primul Război Mondial, TsAGI 1-EA a reușit să efectueze cu succes câteva zboruri la mică altitudine. La 14 august 1932, Cheremukhin a dus elicopterul la o altitudine de 605 metri, depășind cu mult recordul lui D'Ascanio, dar din moment ce Uniunea Sovietică nu era încă membru al FAI, recordul nu a fost recunoscut. [7]
Un alt model de elicopter a fost Kamov A7-3A care se lăuda cu 220 km de autonomie la 130 km / h și cu 500 kg de sarcină utilă, asemănându-se vag cu un popular avion de luptă sovietic din acei ani, Polikarpov I-16 . Construit într-o duzină de exemplare pentru V-VS a fost testat pe teren în timpul Războiului de Iarnă , pentru a ajusta focul artileriei ca o recunoaștere, pentru a-și încheia cariera la începutul operațiunii Barbarossa , folosit de comenzile disperate chiar și pentru atacul asupra pamantul. Toate aeronavele s-au pierdut după doar două săptămâni de serviciu operațional. Prin urmare, acesta a fost probabil primul elicopter de asalt din istorie, înarmat cu bombe și rachete, protejat în coadă de o mitralieră mică.
Inginerul rus Nicolas Florine a construit în acei ani primul elicopter cu rotor tandem care a făcut primul zbor în Belgia la Sint-Genesius-Rode la Laboratoire Aérotechnique de Belgique (azi Institutul von Karman ) în aprilie 1933 și a atins altitudinea de șase metri și recordul de rezistență în zbor de opt minute. Deși rotoarele nu erau contra-rotative, compensarea cuplului a fost totuși realizată printr-o ușoară înclinare a axei rotorului în direcții opuse. Decizia de a nu folosi rotoare contrarotante a fost determinată de dorința de a exploata stabilizarea oferită de efectul giroscopic. Utilizarea co-rotației rotoarelor și lipsa balamalelor în atașarea lamelor la axă, au făcut elicopterul deosebit de stabil în comparație cu mașinile contemporane. [7] [21]
De la a doua perioadă postbelică până astăzi
Impulsul puternic către dezvoltarea aeronauticii a avut loc în perioada celui de- al doilea război mondial , a adus o mare experiență de zbor cu avioanele care ar putea oferi până acum sprijinul necesar pentru dezvoltarea de mașini capabile de performanțele caracteristice ale elicopterului.

Tocmai cu avionul ne-am găsit confruntați cu problema contrarotării datorită cuplului generat de motor în aeronavele cu un singur propulsor, dar prezența aripilor fixe și a proporției dintre ridicare (în funcție de suprafața aripii ) și viteza acestor aeronave a făcut soluția ușoară. Elicopterul, pe de altă parte, nu avea aripi fixe și a fost necesar să aștepți ca cineva să regleze fin conceptele de elice contrarotante sau cel al rotorilor antitors pentru a avea aeronave stabilizate.
Dar principala problemă care trebuie rezolvată s-a datorat faptului că atunci când un elicopter începe să avanseze, palele rotorului care avansează se mișcă cu o viteză absolută mai mare, deoarece pe ele viteza aeronavei se adaugă la aceea datorită mișcării de rotație, în timp ce opusul se întâmplă la cei care se retrag. Prin urmare, primul dezvoltă o ridicare mai mare decât cel din urmă și, în consecință, aeronava tinde să se răstoarne pe partea sa. Această problemă a fost rezolvată în mod strălucit de inginerul spaniol Juan de la Cierva și utilizată pe un avion din propria invenție, girocopterul . De la Cierva a aplicat o balama cu clapă fiecărei lame de rotor care a permis palelor care avansează să se rotească în sus și cele care se retrag să se rotească în jos, pentru a compensa diferența de ridicare între palele înainte și cele de retragere. [22] [23]

Tocmai prin exploatarea experienței dobândite prin construirea autorizată a autogirului lui Juan de la Cierva, profesorul Henrich Focke și inginerul Gerd Achgelis au reușit să construiască primul elicopter real din istorie în 1936 în Germania, Focke-Achgelis Fw 61. care, net superioară predecesorilor săi, a adus recordurile mondiale de altitudine, distanță și viteză 3 427 m, 230,348 km și 122,5 km / h, care se desfășoară, de asemenea, într-o demonstrație spectaculoasă în interiorul Deutschlandhalle din Berlin pilotat de celebra aviator german Hanna Reitsch . [24]
Primul model militar utilizat în mod activ a fost în schimb Flettner Fl 282 Kolibri (răspunzând la formula așa-numitului sincropter , cu doi rotori contrarotați care se intersectează, ale căror perechi s-au anulat reciproc, o formulă care după război a fost preluată de compania americană Kaman ) proiectată de Anton Flettner și folosită de Kriegsmarine , marina germană, în timpul celui de- al doilea război mondial pentru patrule antisubmarin la bordul navelor de escortă către convoaie. [24]
Cu toate acestea, elicopterul a fost stabilit în Statele Unite de către designerul aeronautic de origine ucraineană Igor Sikorsky , care și-a pilotat Vought-Sikorsky VS-300 pe 14 septembrie 1939. Acest elicopter îmbunătățit și dezvoltat a marcat succesul definitiv al formulei cu un singur rotor cu un rotor cuplu de coadă (conform schemei sugerate încă din 1912 de Boris Yuriev), acum comun pentru majoritatea elicopterelor, dar care la vremea pionierii nu se bucurase de multă avere. [24] În schimb, formula rotorului coaxial cu două motoare a fost adusă la succes de către designerul sovietic Nikolaj Ilič Kamov , care în 1952 a creat Ka-15 , primul elicopter produs în serie dintr-o serie lungă de mașini proiectate de Kamov începând cu anii celui de-al doilea război mondial. [25]
Funcționare și concepte de bază
Problemele principale
În urma dezvoltării istorice a elicopterului a fost posibil să vedem care erau principalele probleme tehnice de depășit pentru a obține o mașină capabilă să zboare în mod fiabil. Aceste probleme fuseseră deja recunoscute și descrise de diferiți pionieri, precum Sikorsky în clasicul său „Povestea aripilor-S: o autobiografie” [26] . Pentru a înțelege elicopterul din punct de vedere tehnic, este de aceea interesant să rezumăm pe scurt aceste probleme din punct de vedere fizic.
Aerodinamica

Având în vedere un corp aerodinamic care se mișcă cu o anumită viteză într-un fluid, acesta generează o forță aerodinamică " "perpendicular pe viteza (numită ridicare ) și una paralelă (numită rezistență deoarece este întotdeauna orientată în așa fel încât să încetinească corpul în mișcare) care au o intensitate proporțională cu densitatea fluidului" ρ ", la suprafața corpului "S", pătrat de viteza "V" și unghiul de atac sau de atac "α":


Din păcate, această relație simplă (și evident alte relații mai complicate) nu a fost cunoscută sau nu a fost aplicată pe aripa rotativă decât după anii 1910 și, prin urmare, până atunci atât puterea motorului necesară pentru a depăși rezistența aerodinamică a lamelor este chiar forma lamele necesare pentru a produce o ridicare suficientă pentru a depăși greutatea elicopterului au fost alese mai mult prin intuiție decât matematic. Din această relație simplă se poate observa că cheia variației ascensorului și, prin urmare, a controlului elicopterului este de a varia viteza (de rotație a palelor) și / sau incidența. Primii pionieri au fost nevoiți să folosească prima metodă, deoarece pentru a avea un mecanism simplu și eficient de modificare a unghiului de incidență a lamelor va fi necesar să așteptați până în 1906 cu brevetul Crocco . Astăzi, viteza de rotație a rotorului este menținută fixă de dispozitivele de control automat și se preferă să se modifice unghiul de atac al palelor.
Rotor cuplu

Principiul acțiunii și reacției a fost cunoscut datorită lui Isaac Newton încă de la sfârșitul secolului al XVII-lea. De obicei, este văzut în acțiune în timpul tragerii unui tun : efectul de acțiune este cel al tunului care împinge proiectilul înainte cu mare viteză, dar la acest efect se adaugă cel al reacției proiectilului care împinge tunul înapoi generând caracteristica recul .

Într-un elicopter, lamele pot fi văzute ca proiectil din exemplul anterior și motorul (cu fuzelajul de care este atașat) ca tun. Atâta timp cât tunul-motor este plantat pe pământ, nu se întâmplă nimic ciudat, dar de îndată ce se ridică de la sol, lamele proiectilului îl fac să se rotească în direcția opusă, tocmai prin reacție. Un concept care, deși era deja cunoscut și din punct de vedere matematic, părea să scape de primii pionieri și chiar de Leonardo , care nu prevăzuse niciun mijloc de anti-cuplu pentru șurubul său aerian . Pentru a depăși acest lucru, este necesar, prin urmare, să compensați reacția, de exemplu, utilizând un număr par de rotoare care se rotesc în direcția opusă (ca de exemplu în Cornu și Breguet), sau un rotor auxiliar în coadă care creează o forță opusă (ca pentru exemplu în Von Baumhauer); această din urmă configurație a devenit cea standard pentru elicopterele moderne și, prin urmare, este definită ca „convențională”. O altă metodă este de a trage direct un fluid la viteză mare din capetele rotorului, care devine astfel tunul din exemplul anterior (iar fluidul aruncat devine proiectil). În acest fel, reacția acționează direct asupra rotorului și nu asupra fuselajului. Rotoarele de acest tip se numesc jeturi de vârf, iar Fairey Rotodyne a fost unul dintre cele mai faimoase exemple.
Mișcare avansată - balamale
Igor Sikorsky a rezumat bine ideea din spatele nașterii elicopterului: „ideea unei aeronave capabile să se ridice de pe sol și să plutească încă în aer s-a născut probabil în același moment în care omul a visat prima dată să zboare” [ 27] . Cu toate acestea, elicopterul trebuie să fie capabil să ajungă și în locul în care să plutească în aer pentru a face treaba principală pentru care a fost conceput și, prin urmare, trebuie să fie capabil să zboare înainte în ceea ce se numește „mișcare înainte”. Când un rotor se mișcă, forța aerodinamică creată de lamă nu mai este constantă, dar variază pe măsură ce se rotește cu 360 ° în jurul butucului. Pentru a înțelege acest lucru, priviți un rotor de sus și urmați mișcarea vârfului uneia dintre lamele sale, așa cum se arată în imaginea din lateral.

Numind Vr viteza lamelor datorită rotației și Vv viteza constantă de zbor a elicopterului (și, prin urmare, a rotorului cu lamele sale), vedem că:
- când lama este pe partea dreaptă, vârful acesteia se deplasează cu o viteză totală egală cu suma Vr + Vv;
- în timp ce în partea stângă se deplasează cu o viteză totală egală cu diferența Vr-Vv, deoarece Vv are aici direcția opusă Vr.
Dar întrucât forța aerodinamică care acționează pe o suprafață aerodinamică este proporțională cu (pătratul vitezei), va fi deci diferită pe cele două părți tocmai datorită vitezei de zbor Vv; în special, forța aerodinamică va fi mai mare pe partea dreaptă și mai mică pe partea stângă. Partea dreaptă este numită „înainte”, în timp ce partea stângă este numită „înapoi”. Așa cum a experimentat-o De la Cierva în primele sale trei prototipuri giroscopice , această asimetrie, dacă nu este corectată corect, duce la efecte dezastruoase. În special:

- asimetria ascensorului generează un moment de rulare care face elicopterul să se rotească în sensul acelor de ceasornic într-o vedere din spate, cam așa cum se întâmplă pe o scară panoramică pe care există două greutăți, una mai mare decât cealaltă. L'esempio della bilancia a piatti aiuta anche a capire la soluzione adottata da de la Cierva: quando i bracci della bilancia ruotano per effetto dei differenti pesi, essi non si trascinano in rotazione anche tutta la struttura della bilancia stessa perché i bracci sono liberi di ruotare rispetto alla struttura. Se ora si vedono i bracci della bilancia come le pale del rotore, si capisce che per evitare il ribaltamento (della bilancia-elicottero) è sufficiente collegare la pala al mozzo con una semplice cerniera. Questa cerniera permette alla pala di muoversi liberamente verso l'alto ed il basso ed è perciò definita di flappeggio (dall'inglese "to flap").
- per quanto riguarda le variazione della resistenza aerodinamica , in una vista dall'alto si vede che l'effetto è quello di scaricare sul rotore una coppia variabile sul giro. Questo effetto è normalmente abbastanza piccolo dato che le resistenze aerodinamiche hanno generalmente un ordine di grandezza inferiore alla portanza ma si somma all'effetto della forza di Coriolis . Alla lunga, questo continua sollecitazione variabile genera sull'attacco pala-mozzo uno stress meccanico con possibile rottura per fatica . Per ovviare a ciò, sempre de la Cierva aggiunse un'ulteriore cerniera all'attacco pala-mozzo che permetteva la libera rotazione della pala anche in avanti e all'indietro, chiamata cerniera di ritardo (dall'inglese "lead-leg").
A queste due cerniere se ne deve aggiungere una terza: come detto, per il controllo dell'elicottero è necessario variare l'incidenza delle pale per variarne la portanza generata. Ciò si ottiene con la cerniera di variazione passo , posta sempre verso la radice della pala. L'attacco pala-mozzo è piuttosto affollato di cerniere.
Trazione
Ogni pala genera la propria forza aerodinamica; la somma su tutte le pale viene definita trazione. La trazione agisce al centro del rotore ed è perpendicolare al disco del rotore, cioè al disco descritto dall'estremità delle pale durante la loro rotazione. Il controllo dell'elicottero passa attraverso la modifica del valore e dell'orientazione della trazione.
Massima velocità di volo
Mentre per i velivoli ad ala fissa la massima velocità di volo può raggiungere valori elevati (l'esempio estremo è lo Space Shuttle con i suoi quasi 28.000 km/h), per un elicottero sono tipiche velocità di crociera non superiori ai 350 km/he questo valore rappresenta un limite massimo che non può essere superato se non adottando configurazioni aerodinamiche particolari come ad esempio nel caso del Sikorsky S-67 Blackhawk . La motivazione ha origine da una serie di compromessi aerodinamici e meccanici, i più importanti dei quali sono elencati di seguito:
- Quando la pala durante la sua rotazione si trova sul lato retrocedente, alla sua velocità di rotazione Vr si sottrae la Vv con cui vola l'elicottero. Dato che il totale deve restare maggiore di zero (se si annullasse la portanza si annullerebbe di conseguenza), deve sempre essere:
- Vv<Vr
- Che sia Vv<Vr non è sufficiente. Se infatti la velocità sul lato retrocedente è positiva ma molto bassa, per generare comunque portanza di valore sufficiente l'angolo d'incidenza deve essere aumentato di conseguenza. Ma questo aumento d'incidenza è limitato dallo stallo della pala. Quindi non basta che la Vv sia minore della Vr ma essa deve effettivamente essere "molto minore" per restare lontani da questa situazione. Quindi:
- Vv<<Vr
- Quando la pala si trova sul lato avanzante, invece, le due velocità si sommano. Anche in questo caso la loro somma non può però crescere indefinitivamente perché quando essa si avvicina ad un valore critico prossimo alla velocità del suono "Vs", la resistenza aerodinamica cresce notevolmente e la portanza diminuisce. Quindi:
- Vv+Vr<Vs
- Anche se con un legame non semplice, il tipico rumore prodotto da un elicottero è proporzionale alla Vr, che deve quindi essere contenuta per motivi di inquinamento acustico. Quindi:
- Vr più piccola possibile
- Il rotore è collegato al motore tramite una ruota libera esattamente come i pedali di una bicicletta alla ruota posteriore. In questo modo, se durante il volo il motore (oi motori) cessa di funzionare (pedalare), il rotore non si blocca ma continua a ruotare per inerzia. In particolare, il rotore deve continuare a ruotare per inerzia per un certo tempo necessario al pilota per riconoscere il problema ed iniziare la manovra d'emergenza chiamata autorotazione . L'inerzia del rotore è proporzionale al suo peso ed alla sua Vr, che deve quindi essere elevata per dare al pilota maggior tempo di intervento per effettuare questa manovra di vitale importanza. Quindi:
- Vr più grande possibile
Come si vede, sia la Vr che la Vv sono determinate da molti requisiti fra loro contrastanti i quali impongono alla fine un valore medio di circa:
- Vr ≅ 700 km/h (che vuol dire che le pale di un tipico elicottero da elisoccorso ruotano a 5-6 giri al secondo)
- Vv di volo massima ≅ 350 km/h
Effetto giroscopico
Da un punto di vista matematico, il rotore è un sistema in movimento con un moto armonico forzato in risonanza . Al di là della trattazione matematica, ciò significa in pratica che se si potesse dare un colpetto verso l'alto alla pala quando transita per esempio posteriormente sulla coda, essa flappeggerebbe sì verso l'alto ma raggiungendo il massimo non sulla coda stessa, come ci si aspetterebbe, bensì quando si trova sul lato destro, ovverosia con un ritardo di 1/4 di giro (90°). Questo effetto di ritardo, detto effetto giroscopico , può essere osservato più semplicemente in una trottola . Ovviamente nel caso del rotore il "colpetto" è costituito da una variazione di portanza. Questo implica che se si vuole ottenere ad esempio il massimo del flappeggio in corrispondenza del lato destro, l'aumento dell'incidenza della pala (ovverosia della portanza) deve essere imposto in corrispondenza della coda. Anche questo concetto fisico, seppur ben noto anche matematicamente, sfuggì ai pionieri. Lo stesso Sikorsky non aveva previsto questo sfasamento di 90° sui comandi del sul suo primo VS-300 , che risultava quindi non intuitivamente controllabile.
Rotore

la testa del rotore alla quale sono attaccate le pale per mezzo di cerniere;
l'albero ruotante;
il piatto oscillante collegato alle pale tramite le due biellette alla destra e alla sinistra dell'albero;
il meccanismo che modifica l'inclinazione del piatto oscillante
Il rotore è il cuore dell'elicottero dato che ha la funzione non solo di generare la trazione necessaria a sostenere l'elicottero in volo ma anche la propulsione necessaria a vincere la resistenza aerodinamica e le forze ei momenti necessari a manovrarlo (solo per comparazione, in un aereo queste tre funzioni sono assolte da tre componenti ben distinte, ovverosia l' ala , il propulsore ed i piani di coda rispettivamente). Nel seguito sono elencati gli elementi principali del rotore.
Testa del rotore o mozzo
Solitamente in titanio o materiale composito, è il complesso a cui sono attaccate le pale e che si innesta sull'albero.
Albero
Solitamente in materiale metallico, ha sezione circolare ed è cavo all'interno per limitarne il peso. Una estremità si innesta nella trasmissione mentre all'altra si innesta (oppure è un tutt'uno con) la testa del rotore.
Cerniere

È lo snodo meccanico attraverso il quale le pale sono collegate al mozzo. Nei primi elicotteri degli anni '50 del 1900 esse erano delle semplici cerniere a cuscinetti . A causa delle elevate forze centrifughe che su di esse si scaricavano dalle pale, la loro usura era piuttosto veloce e comportava una frequente sostituzione, con elevati costi di manutenzione. Una prima soluzione a questo problema fu l'eliminazione completa delle cerniere di flappeggio e di ritardo attraverso la costruzione di pale dotate di una radice molto soffice ed in grado quindi di lasciare flappeggiare e ritardare la pala liberamente anche senza la presenza fisica di una cerniera; precursore di questa soluzione fu il MBB Bo 105 . Rotori di questo tipo si definiscono hingeless (senza cerniera, appunto) o semirigidi . Nei rotori semirigidi la cerniera di variazione passo, con i relativi cuscinetti, viene mantenuta essendo meno soggetta ad usura non dovendo supportare direttamente le forze centrifughe. In rotori più moderni la cerniera di variazione passo è sostituita da una più semplice cerniera in materiale elastomerico oppure è anch'essa eliminata in favore di una radice della pala costruita in modo tale da lasciare alla pala completa libertà di rotazione attorno ai tre assi di flappeggio, di ritardo e di variazione passo. Rotori di questo tipo si definiscono bearingless (senza cuscinetti) o rigidi , che è una definizione fuoriviante dato che, all'opposto, la radice della pala è in realtà soffice (un rotore propriamente rigido, ovvero con una radice della pala effettivamente rigida e collegata rigidamente al mozzo, è quello ad esempio del Sikorsky X2 ).
Smorzatori

Come visto il rotore è fisicamente un sistema in risonanza , tuttavia i movimenti delle pale attorno alle cerniere non mostrano i fenomeni distruttivi tipici della risonanza (ben evidenziati ad esempio dal famoso crollo del Ponte di Tacoma ), questo perché i relativi movimenti vengono smorzati . In particolare, il moto attorno:
- alla cerniera di flappeggio viene fortemente smorzato dalle forze aerodinamiche.
- alla cerniera di variazione passo viene smorzato dal collegamento meccanico e/o idraulico con i comandi di volo attraverso il piatto oscillante.
- alla cerniera di ritardo non è invece sufficientemente smorzato aerodinamicamente e/o meccanicamente e quando l'elicottero è a terra esso si può accoppiare con il movimento dovuto all' elasticità dei carrelli d'atterraggio generando una pericolosa risonanza detta "ground resonance" la quale può portare alla distruzione della struttura in pochi secondi; per tale motivo si adottano smorzatori viscosi attorno a questa cerniera.
Pala

La pala è l'elemento che genera tutte le forze aerodinamiche e che le trasmette al mozzo e di conseguenza all'elicottero. La forma ed il numero delle pale sono definiti da requisiti meccanici ed aerodinamici spesso contrastanti. Senza entrare nel merito, in generale:
- per limitare la resistenza aerodinamica indotta , le pale devono avere un elevato allungamento alare ; per soddisfare tale requisito l' apertura della pala deve quindi essere la più elevata possibile e la corda la più piccola possibile, esattamente come avviene per l'ala degli alianti .
- la lunghezza delle pale deve comunque essere contenuta per limitarne il peso, mentre la corda deve essere superiore ad un certo valore per massimizzare l' efficienza aerodinamica , che è bassa per corde basse (per i modelli di elicottero radiocomandati, ad esempio, l'efficienza aerodinamica è piuttosto scarsa).
- la velocità Vr dovuta alla rotazione attorno al mozzo, aumenta man mano che ci si sposta dalla radice alla estremità della pala, essendo nulla alla radice. Dato che la portanza va col quadrato della velocità, essa assumerebbe valori via via maggiori spostandosi verso l'estremità della pala; si compensa questo effetto svergolando la pala lungo l'apertura in modo tale che l'angolo d'incidenza sia via via minore.
- la superficie totale delle pale è determinata, in maniera complessa, in base alle prestazioni che l'elicottero deve essere in grado di sviluppare in volo. Una volta determinata, essa viene suddivisa fra le pale il cui numero è determinato oltre che dai requisiti appena elencati, anche da altri; ad esempio, il loro numero deve essere il più basso possibile per contenere sia il peso complessivo del rotore, sia il suo costo, sia la sua resistenza aerodinamica (un mozzo con poche pale è aerodinamicamente più "pulito"); deve essere elevato per limitare le vibrazioni prodotte dalle pale (che è proporzionale al numero delle pale stesse); molte pale implica corde più basse e quindi minore efficienza aerodinamica; corde basse implica anche minore spazio per la struttura della pala che quindi tende a deformarsi troppo.
- anche la forma del profilo alare è determinato da requisiti contrastanti.
Tecniche di pilotaggio
La conduzione di un elicottero è completamente differente da quella di un aereo, poiché i principi fisici in gioco sono solo parzialmente gli stessi. Nell'aereo si usa sostanzialmente una mano per l'assetto orizzontale e laterale ed i piedi per la direzione. Nell'elicottero occorre avere una mano anche per regolare la potenza del motore e l'inclinazione delle pale, quindi occorre coordinare cinque movimenti invece di tre. Inoltre, mentre l'aereo è stabile e può proseguire il volo orizzontale da solo, l'elicottero non appena vengono abbandonati i comandi tende ad inclinarsi o ad alterare la posizione.
In realtà il volo orizzontale non presenta grandi difficoltà, mentre mantenere l'elicottero fermo in una posizione, quota e direzione determinate è estremamente difficile, in particolare in presenza di vento, il che complica gli atterraggi di precisione e soprattutto i recuperi dall'alto con il verricello .
Negli elicotteri a turboalbero non occorre prestare particolare attenzione a non far perdere giri al motore, in quanto questa incombenza viene normalmente demandata al governor della turbina che agendo sul fuel control (cioè sul controllo del combustibile iniettato) assicura che il rotore principale giri sempre con la velocità prevista dal progetto e di conseguenza anche quello di coda, in modo che l'aeromobile non perda mai efficienza rotorica. Per quanto riguarda invece gli elicotteri equipaggiati con motori a scoppio (motori endotermici) è compito del pilota prestare particolare attenzione a non far scendere il motore dal regime di rotazione previsto, altrimenti si potrebbe perdere drasticamente potenza, con la conseguente perdita di controllo dell'aeromobile dovuta ad una inefficienza rotorica. Quindi, se viene aumentato l'angolo delle pale eccessivamente senza compensarlo con un aumento dell'acceleratore, il motore perde giri e anche ridando "tutta manetta", non si riprende, se non riportando le pale in posizione neutra. Se il motore finisce per spegnersi, occorre molto tempo per riaccenderlo (operazione molto difficoltosa e pericolosa). Alcuni elicotteri sono sprovvisti della manetta di controllo del motore, inoltre la maggior parte degli elicotteri a turbina (esotermici) vengono pilotati con la o le manette completamente frizionate, rendendo impossibile una regolazione istantanea da parte del pilota. La maggior parte degli elicotteri con motore a pistoni è al giorno d'oggi provvista di un sistema automatico di controllo del regime del motore (governor).
I controlli
I controlli dell'elicottero sono il collettivo , la manetta , il ciclico e la pedaliera .
Il collettivo (o CPC - collective pitch control ) controlla l'angolo di calettamento geometrico delle pale, il quale non va confuso con l' angolo di attacco , cioè l'inclinazione delle pale rispetto al piano orizzontale sul quale sono innestate (di questo piano, l'asse di rotazione del rotore è la normale). All'aumento dell'angolo di attacco corrisponde un aumento di incidenza e conseguente di portanza ed esso è solo in parte regolato dal collettivo, in quanto è il ciclico che varia l'inclinazione della pala ad ogni rotazione per spostare l'aeromobile nelle varie direzioni, mentre il collettivo comporta una variazione dell'inclinazione su tutte le pale contemporaneamente in modo da ricevere più o meno spinta verso l'alto dell'elicottero.
La manetta è un semplice acceleratore che consente di controllare il regime del motore e dunque di trasmettere maggiore o minor potenza al rotore secondo la necessità del momento. Nei modelli più recenti con motore a turbina si utilizza un sistema computerizzato di gestione dei regimi che consente di delegare al software accelerazione e decelerazione del motore. Questo sistema è chiamato FADEC (Full Authority Digital Engine Control), termine usato anche per il sistema presente negli aerei che svolge la stessa funzione, rendendo non più necessario l'uso della manetta se non in caso di emergenza. I più recenti elicotteri monomotore sono equipaggiati con due FADEC di cui uno è alimentato da una batteria indipendente, in modo tale da assicurare un perfetto funzionamento dell'elicottero anche in caso di completa avaria elettrica e/o elettronica.

1. piatto esterno fisso (blu)
2. piatto interno rotante (metallo)
3. giunto sferico
4. controllo lungo l'asse di beccheggio . Inclina il rotore in senso longitudinale e evita la rotazione dell'anello esterno (compasso).
5. controllo lungo l'asse di rollio . Inclina il rotore lateralmente
6. bielle di collegamento (color metallo) alle pale del rotore
In nero le bielle che variano il passo delle pale controllate dal piatto interno
Il ciclico , con comando a cloche , è il più sofisticato ed il più delicato dei controlli, poiché governa la variazione ciclica dell'angolo di attacco delle pale: le pale, durante il loro giro di 360° non hanno un angolo di attacco costante, ma hanno una variazione di inclinazione che serve in generale ad ottimizzare la propulsione, ed in particolare a distribuire opportunamente la spinta in modo da consentire variazioni di assetto e spostamento dell'elicottero.
Questa variazione è appunto dominata dal ciclico, così chiamato perché la fa operare nel numero di volte desiderate e possibili per ciascun giro della pala (per cicli).
La variazione è poi opportunamente anticipata (calettatura) tenendo conto di fattori come la precessione giroscopica . Infatti, se su un corpo che ruota su sé stesso andiamo ad imprimere una forza trasversalmente al suo asse di rotazione essa risponderà 90° dopo rispetto al senso di rotazione stesso; quindi quando diamo ciclico avanti (ipotizziamo un rotore sinistrorso, cioè che gira in senso antiorario) le biellette del piatto oscillante si alzeranno ed andranno a dare ulteriore passo alla pala che sarà a sinistra cosicché la portanza si porterà in maggior parte sul semidisco posteriore e l'elicottero potrà traslare in avanti.
La pedaliera aziona tramite leveraggi il rotore di coda (se esistente) il quale consente il controllo della direzione della prua dell'aeromobile rispetto alla direzione di avanzamento, ovvero il controllo dello "yaw axis". Essa svolge una importantissima funzione durante i decolli e gli atterraggi verticali: l'abbassarsi o l'innalzarsi della leva del passo collettivo comporta infatti variazioni della coppia di reazione che cambiano la direzione della prua. Poiché il rotore di coda ha molto più braccio della prua dell'elicottero rispetto all'asse di rotazione del rotore principale, pochi gradi di variazione dell'angolo di prua possono muovere facilmente il pericoloso rotore anche di un metro a destra oa sinistra. Occorre grande prontezza per compensare con il piede eventuali turbolenze che colpiscano le pale in modo non uniforme.
Decollo
Il decollo dell'elicottero si ottiene incrementando la spinta che le pale esercitano sull'aria; questo è possibile aumentando il passo collettivo (angolo d'incidenza delle pale) che determina una maggiore esposizione all'aria della superficie alare. In questa fase il numero di giri del rotore rimane costante come del resto in tutte le fasi del volo (manetta su flight). Bisogna inoltre esercitare una pressione sulla pedaliera che comanda il rotore di coda in modo da esercitare una forza pari e opposta al rotore principale.
Il rotore di coda non è altro che "un'anticoppia" che si contrappone alla coppia del rotore principale che determinerebbe una rotazione della fusoliera nel senso opposto alla rotazione del rotore, per il terzo principio della dinamica , che ad ogni azione ne corrisponde una uguale e contraria.
Facendo ciò l'elicottero si alza e rimane nell'assetto di volo desiderato.
Spostamento longitudinale
Il pilota per portare l'elicottero dal volo a punto fisso al volo traslato non farà altro che portare in avanti la leva del passo ciclico, però così facendo l'elicottero prenderà un assetto picchiato e quindi perderà quota, per ovviare al problema bisognerà dare un po' di collettivo per far sì che la portanza sia pari al peso più il difetto di assetto; però dando collettivo il pilota darà più resistenza al rotore principale quindi la coppia generata sarà più forte, la diminuirà dando pedaliera nel senso di rotazione del rotore. Chiaramente tutte le sopracitate operazioni andranno fatte quasi contemporaneamente.
Cambio di direzione orizzontale

La "svolta" orizzontale a sinistra oa destra, tecnicamente una virata , si ottiene con un opportuno sfruttamento di quella controrotazione che era il problema da superare per il genio di Leonardo.
In volo, i due rotori sono in moto rispettivamente bilanciato e producono l'uno lo spostamento (verticale) e l'altro la stabilizzazione (longitudinale).
Nell'elicottero tradizionale, quindi, il rotore di coda consente il cambio di direzione (taluni dicono "cambio di prua") semplicemente intervenendo sul passo delle pale: aumentandolo o diminuendolo, il rotore di coda darà minore o maggiore contrasto al moto "istintivo" di controrotazione, facendo perciò spostare la coda dell'aeromobile e dunque cambiare di direzione.
Nell'elicottero ad eliche controrotanti (come il Chinook), invece, un principio simile consente di intervenire sulla velocità di rotazione di uno dei due rotori, con produzione di analoghi effetti ed uguali risultati.
Gli stalli
Lo stallo di un elicottero avviene quando i filetti fluidi di aria che viene investita dalla pala si staccano in prossimità del bordo d'attacco quindi non si verrà a creare la zona di depressione sull' estradosso (parte superiore della pala) e la nostra pala non avrà più portanza: tale situazione si verifica con un angolo di incidenza superiore ai 18 ° , costruttivamente dando tutto passo non si raggiungono valori così alti però in determinate situazioni ci si può arrivare.
Lo stallo del rotore è la principale causa dei limiti di velocità di un elicottero, se noi consideriamo che le pale girando vanno a creare un disco e mettiamo questo disco in VRO (volo rettilineo orizzontale) a velocità abbastanza elevate noteremo che metà disco (semidisco avanzante) andrà ad investire aria rispetto al senso di marcia mentre l'altra metà (semidisco retrocedente) la subirà negativamente.
Tenendo conto che nella formula della portanza

la velocità entra al quadrato, al semidisco avanzante andrà sommata la velocità dell'elicottero mentre al semidisco retrocedente questa velocità andrà sottratta, avremo quindi un semidisco con una portanza molto elevata ed un semidisco con una portanza pressoché nulla quindi l'elicottero comincerà a vibrare in maniera molto forte e poi comincerà a girare su se stesso.
In ultimo il più pericoloso degli stalli: il cosiddetto power settling (scaduta con potenza) comunemente chiamato anello vorticoso o stato di vortice (in inglese è detto anche vortex ring state ); calcolando che il rotore genera un flusso d'aria che lo attraversa dall'alto verso il basso se il pilota si appresta ad un atterraggio quasi verticale con una velocità di discesa sostenuta c'è il rischio che l'elicottero scenda alla velocità dell'aria da lui stesso generata e quindi avremo il rotore che "naviga nel vuoto"; aumentando il passo collettivo non faremo altro che aumentare la velocità di questo flusso per cui peggioreremo solo la situazione, l'unica maniera per uscirne è entrare in autorotazione, se la quota lo permette, e traslare in avanti riducendo il passo collettivo, una volta fuori dal flusso potremo ridare passo (Vedi nota [28] ).
Il vortice può investire l'elicottero anche in caso di vento relativo in coda, cioè se l'elicottero è fermo con vento da dietro, oppure se l'elicottero procede all'indietro. Questa situazione deve essere assolutamente evitata perché rende l'elicottero ingovernabile.
L'autorotazione
 |
 |
Descrizione del fenomeno della autorotazione. Durante un'autorotazione, il flusso diretto verso l'alto dell'aria permette al rotore principale di girare alla velocità normale. In pratica, regolando l'incidenza della pala in discesa, si garantiscono nel contempo, la componente in avanti e la componente di portanza del vettore risultante "forza aerodinamica". |
È la manovra di emergenza effettuata durante la discesa dopo un'avaria all'impianto motore, simulata o reale. Durante questa discesa controllata, il rotore principale gira a causa del flusso d'aria verticale attraverso il disco del rotore. Il pilota deve abbassare il collettivo per mantenere il numero di giri al minuto del rotore principale durante la discesa entro parametri prestabiliti. La velocità di rotazione non può essere né troppo alta né troppo bassa per evitare danneggiamenti strutturali. Il pilota, poco prima dell'atterraggio, alza il collettivo e frena l'elicottero.
Nell'elicottero l'autorotazione equivale alla planata con motore spento in un aeroplano. I piloti si esercitano nell'autorotazione in modo da riuscire ad effettuare un atterraggio di emergenza. Durante l'autorotazione, viene disattivato il collegamento tra il rotore principale ed il motore, che non fornisce più al rotore l'energia necessaria per girare. L'energia viene invece generata dal passaggio dell'aria attraverso le pale durante la discesa e dalla forza d'inerzia del rotore principale. Il numero di giri al minuto del rotore è il fattore più importante da considerare durante l'autorotazione. Girando, il rotore fornisce la portanza necessaria a stabilizzare la discesa ed immagazzina l'energia utilizzata per ammortizzare l'atterraggio. Se il numero di giri al minuto diminuisce eccessivamente, il rotore non potrà svolgere questa funzione poiché, ad esempio, diminuirà la componente di portanza.
Qualunque elicottero deve essere in grado di scendere in autorotazione; esistono però dei campi di velocità pericolosi, cioè condizioni di volo per le quali l'autorotazione non garantisce un buon esito:
- una prima condizione è rappresentata da volo a bassa velocità ea bassa quota; in questo caso se si ferma il motore, la bassa velocità di traslazione non permette di ottenere un flusso d'aria attraverso il disco sufficiente a produrre una portanza idonea a frenare la discesa ed evitare l'impatto con il suolo.
- la seconda condizione critica di volo si ha quando l'elicottero vola comunque al sotto di una certa altezza dal suolo, anche ad elevata velocità di traslazione. In questo caso, l'inevitabile perdita di quota conseguente all'avaria del motore, comporterà l'impatto con il suolo, senza che ci sia il tempo di effettuare in sicurezza la manovra di frenata all'ultimo istante, che garantirebbe l'incolumità (detta flare ).
L'insieme di queste condizioni di volo è rappresentato sul grafico caratteristico quota-velocità, con un'area al di sotto di una curva che prende il nome di curva dell'uomo morto . [29] I piloti di elicottero sono a conoscenza del fenomeno e cercano di restare in queste condizioni il minor tempo possibile, guadagnando quota e velocità, appena possibile, e permanendo nelle condizioni quota-velocità critiche solo per lo stretto necessario, o quando non sia possibile farne a meno.
Impieghi
Civili


Gli impieghi civili dell'ala rotante sono molteplici. Questa qualità specifica deriva dal fatto che l'elicottero può atterrare e decollare in spazi ristretti, può rimanere immobile in aria e muoversi in tutte le direzioni, anche all'indietro.
Tra gli utilizzi civili, sicuramente è da annoverare il trasporto di persone e di materiale e merci. Uno degli elicotteri più grandi al mondo, il russo Mi-6 , può trasportare 90 passeggeri oppure 12.000 kg di carico.
Il servizio di eliambulanza (o elisoccorso ), invece, ha assunto un particolare rilievo grazie alla possibilità concreta di salvare molte vite umane. Molti elicotteri vengono progettati dalle aziende costruttrici già in versione "eliambulanza" che prevede un ampio vano di carico per ospitare a bordo anche più barelle. Il servizio di eliambulanza in Italia è gestito dal 118 che ha basi in varie regioni. Dispone di 7 modelli di elicotteri che sono AgustaWestland AW139 , Bell 412 , AgustaWestland AW109 , Eurocopter EC 135 , Eurocopter BK117 , Eurocopter EC145 e Eurocopter AS 365 .
L'utilizzo antincendio viene effettuato con elicotteri equipaggiati di benna , un recipiente semirigido che può essere riempito d' acqua facilmente ed in breve tempo. Esistono anche modelli di elicottero che invece aspirano l'acqua da un tubo mobile per immagazzinarla in un serbatoio posto sul fondo dell'aeromobile. In Italia il primo reparto elicotteri dei vigili del fuoco è stato creato a Modena nel 1954 con un AB.47G-2 poi denominato Bell 47 . L'iniziativa fu un successo e l'anno successivo vennero acquistati altri elicotteri e vennero creati due nuovi nuclei a Roma e Napoli . Oggi i vigili del fuoco dispongono di tre modelli dei elicotteri che sono Bell 412 , Bell 206 e Bell UH-1 Iroquois .
Altri impieghi sono la costruzione di teleferiche e funivie , la realizzazione e la manutenzione di reti elettriche e di comunicazione in aree impervie, il trasporto in montagna e l'utilizzo per le riprese televisive .
Un impiego civile degli elicotteri è anche il monitoraggio e l'irrorazione delle colture agricole come il progetto Yamaha R MAX di Yamaha Motor Company .
Militari e di polizia


Di solito gli elicotteri dei vari corpi di polizia nel mondo vengono impiegati in attività di soccorso, monitoraggio, recupero in mare o in montagna. Vengono anche impiegati durante le manifestazioni di vario genere o partite di calcio, passando per il monitoraggio del traffico automobilistico su strade e autostrade nei week-end e durante i periodi di estivi, in generale durante i periodi delle vacanze, oppure vengono utilizzati per contrastare i fenomeni di contrabbando. Grazie alle loro ridotte dimensione sono sempre pronti a entrare in azione per garantire la sicurezza dei cittadini dall'alto.
In Italia elicotteri sono in dotazione in tutte le forze armate e forze dell'ordine , in particolare nella Polizia di Stato , nell' Arma dei Carabinieri , nella Guardia di Finanza , nell' Esercito Italiano , nell' Aeronautica Militare , nella Marina Militare , nelCorpo Forestale dello Stato , nel Corpo Nazionale dei Vigili del Fuoco , nel Corpo delle capitanerie di porto - Guardia costiera e nella Protezione Civile . In Italia il primo gruppo volo della polizia di stato è stato costituito ufficialmente il 1º gennaio 1971 a Pratica di Mare ( Roma ). Oggi conta 11 gruppi che coprono tutto il territorio nazionale. La polizia di stato ha in dotazione tre modelli di elicotteri: Agusta-Bell AB206 , AgustaWestland AW109 e Agusta-Bell AB 212 .
L' arma dei carabinieri , invece, ha una lunga storia con il volo visto che durante la prima guerra mondiale ci furono dei piloti carabinieri. Ma il reparto volo con elicotteri viene costituito il 25 marzo 1960 con l'acquisto da parte dell'arma di quattro AB 47 J "Ranger" poi denominato Bell 47 che operavano in Sardegna , Puglia e Sicilia . Oggi L'arma ha a disposizione tre tipi di elicotteri ( Agusta-Bell AB206 , AgustaWestland AW109 e Agusta-Bell AB 412 ) che operano su tutto il territorio nazionale. La prima struttura del reparto volo dei carabinieri è nata il 1º giugno 1965 a Pratica di Mare .
Gli eserciti utilizzano gli elicotteri ovviamente come mezzi di combattimento , ma anche come supporto per i militari e mezzi a terra, esplorazione di scenari di guerra e il trasporto di militari, mezzi o di feriti ( elicotteri cargo ). I mezzi dell'esercito vengono utilizzati anche nelle emergenze e nelle catastrofi ambientali come accaduto in Abruzzo dove elicotteri militari hanno aiutato il trasporto dei feriti gravi e il trasporto degli aiuti che arrivavano da tutto il paese.
L' esercito italiano ha in dotazione gli stessi modelli delle forze dell'ordine ( AB206 , AB205 , AW109 , AB412 e AB212 ) inoltre utilizza, come elicottero da combattimento, il AgustaWestland AW129 ideato e prodotto completamente in Italia, anche se ricorda per fisionomia l'Apache statunitense, e come elicotteri da trasporto l'esercito ha in dotazione due modelli il Boeing CH-47 Chinook che può trasportare mezzi o militari e il NHIndustries NH90 che è impiegato per il trasporto di persone.
Duali
Vari competitori europei del settore difesa-aerospazio, fra i quali l'italiana Leonardo , producono e commercializzano velivoli aeronautici detti dual purpose (elicotteri duali) perché impiegati:
- per scopi civili (dai Vigili del Fuoco , Guardie Forestali , Protezione Civile ): per operazioni di soccorso, spegnimento incendi, monitoraggio ambientale e climatico,
- per finalità militari ( Aeronautica Militare , ecc.): elicottero d'attacco in forze di interposizione internazionali.
Dal punto di vista sia tecnico che economico risulta fattibile ( cost-effective ) la conversione operativa da un impiego militare ad uno civile e viceversa, con costi minimi rispetto ai benefici attesi. Tali benefici per un investimento pubblico in genere sono stimati con una più puntuale e accurata analisi costi-efficacia .
Questi velivoli aeronautici sono progettati e dimensionati specificamente per un duplice scopo e con la flessibilità necessaria nell'eventualità di una diversa tipologia di impiego. Gli "adeguamenti" tecnici non dovrebbero prevedibilmente comportare modifiche strutturali e geometriche per le parti più complesse e costose, quanto l'installazione di parti d'arma, dotazioni elettroniche di rilevamento e simili.
Nelle contabilità del bilancio pubblico i singoli capitoli di spesa (nel previsionale, e consultivo) hanno la propria copertura finanziaria (mediante corrispondenti entrate fiscali, stanziamenti o trasferimenti fra organi della pubblica amministrazione). L'acquisto di un bene dato in proprietà e impiegato da un corpo non militare non è a carico del bilancio del Ministero della difesa . [30] Un'eventuale conversione da scopi civili all'impiego per finalità militari finisce per sottostimare l'effettiva spesa militare ei relativi vincoli di bilancio, ovvero per permettere investimenti di acquisto che, senza il contributo di altri Ministeri, non sarebbero possibili per mancanza di copertura finanziaria.
Inquinamento acustico
I rumori troppo forti possono causare danni irreparabili all' apparato uditivo o alterazioni psicofisiche. Il suono viene misurato in decibel , con il fonometro . La soglia minima di udibilità è 20 decibel (rumore di una foglia che cade). Un suono superiore a 80 decibel viene considerato molesto o fastidioso.
Al pari degli aerei, gli elicotteri generano un forte rumore. Molti studi sono stati fatti e vengono svolti per la riduzione del rumore e buoni risultati si sono ottenuti agendo sulle configurazioni dei rotori di coda. Il NOTAR , il Fenestron e le pale dei rotori di coda degli elicotteri moderni sono disegnate tenendo in gran conto la riduzione del rumore e delle vibrazioni, ricevendo una grossa spinta e finanziamenti dal mondo militare per il quale la furtività è un requisito molto importante. [31]
L'intensità sonora percepita a terra è proporzionale alla velocità relativa dell'elica/rotore/ciclomotore e il flusso libero del fluido circsostante [32] , il coefficiente di propulsione ( thrust coefficient [33] ) e dall'angolo di attacco fra l'ala e l'aria che, unitamente al profilo geometrico, determinano il valore del coefficiente di portanza . L'intensità sonora lungo la superficie ideale di una sfera circoscritta al rotore può essere parametrizzata in funzione di queste grandezze al fine di controllare e mitigare il flusso sonoro prodotto. [34]
L'elicottero nella cinematografia
Gli elicotteri hanno un vasto impiego nella produzione cinematografica e televisiva. I moderni sistemi girostabilizzati, consentono l'utilizzo degli elicotteri come piattaforme stabili e versatili per girare riprese aeree di grande impatto, [35] sia nei film che nelle pubblicità. [36] Esistono società specializzate ed autorizzate all'utilizzo di elicotteri per riprese cinematografiche. [37] [38] In molti casi, particolarmente nei film di guerra o di azione, l'elicottero è presente nelle scene, contribuendo con alta spettacolarità. [39] Di seguito alcuni esempi: [40]
- Bell 47 Sioux - Il primo elicottero certificato per uso civile, protagonista di Avventure in elicottero ( Whirlybirds ), una serie televisiva statunitense in 111 episodi andati in onda dal 1957 al 1960 negli Stati Uniti e negli anni sessanta in Italia sulla RAI. Negli Stati Uniti la serie è conosciuta anche con il nome di Copter Patrol . È stato inoltre protagonista del film e della serie TV M*A*S*H ( 1970 ) nella versione eliambulanza , e nei film di James Bond (interpretato da Sean Connery ) A 007, dalla Russia con amore (film) ( 1963 ), in cui dopo essere sceso dal treno viene attaccato da un elicottero della Spectre che viene poi abbattuto da Bond, e Agente 007 - Si vive solo due volte ( 1967 ) in cui vola su un autogiro alla ricerca di una base della Spectre e viene attaccato da una squadriglia di questi elicotteri.
- Bell UH-1 Iroquois , soprannominato Huey dagli equipaggi - Impiegato largamente durante la guerra del Vietnam , è presente in tutte le principali pellicole ambientate nel conflitto. Celebre è la sequenza dell'attacco al villaggio sulla musica della cavalcata delle valchirie in Apocalypse Now ( 1979 ). Si ricordano anche le sequenze drammatiche per l'evacuazione di feriti in Platoon ( 1986 ) e We Were Soldiers - Fino all'ultimo uomo ( 2002 ). Oltre ai film sul Vietnam, l'elicottero è stato largamente impiegato nel cinema di Hollywood fino a tempi recenti. In Matrix ( 1999 ) viene utilizzato per salvare il protagonista dopo un corso di pilotaggio di pochi secondi ricevuto via computer dalla coprotagonista impersonata da Carrie-Anne Moss . In Behind Enemy Lines - Dietro le linee nemiche ( 2001 ) il team di salvataggio del pilota abbattuto utilizza dei Bell UH-1N Twin Huey in versione armata di razzi e minigun.
- Hughes OH-6 Cayuse detto anche Loach - Elicottero da osservazione coprotagonista della sequenza della cavalcata delle valchirie con lo Huey in Apocalypse Now .
- Sikorsky UH-60 Black Hawk - Al centro della battaglia di Mogadiscio del 1993 in Somalia , ricostruita nel film Black Hawk Down - Black Hawk abbattuto , diretto da Ridley Scott nel 2001 . La versione HH-60J Jayhawk della United States Coast Guard è protagonista delle riprese di ricerca e salvataggio in La tempesta perfetta ( 2000 ) e The Guardian - Salvataggio in mare ( 2006 ); invece, nel film Caccia a Ottobre Rosso un Seahawk della marina statunitense decolla per silurare il sommergibile russo.
- Apache - Protagonista del film Apache pioggia di fuoco , titolo originale Fire Birds del 1990 , incentrato sull'addestramento di un pilota da combattimento ( Nicolas Cage ) nella guerra a narcotrafficanti che utilizzavano un elicottero da combattimento di finzione chiamato Scorpion, in realtà derivato dall'OH-6 Cayuse. Nel film L'incredibile Hulk , Hulk viene attaccato da un Apache che abbatte lanciandogli un rottame di ferro. In GI Joe: la nascita di Cobra 2 Apache fanno da scorta al convoglio che i Cobra intercettano, e vengono abbattuti dalle armi futuristiche della gunship (cannoniera) di Cobra
- OH-58D Kiowa - Versione militare del Bell 206 JetRanger, utilizzato come elicottero da osservazione e coprotagonista con l'Apache nel film Apache pioggia di fuoco . Utilizzato anche estesamente nel ruolo di elicottero della polizia in molti telefilm girati in USA.
- MD-520N NOTAR - Compare nel film Mission: Impossible ( 1996 ) in un inseguimento a un treno TGV che si conclude all'interno dell' Eurotunnel .
- MH 53 Pave Low - È l'elicottero in cui si trasforma il Decepticon Blackout nel film Transformers di Michael Bay del 2007 . In Transformers - La vendetta del caduto appare un modello simile di colore leggermente diverso, tratto dal giocattolo Grindor, un redeco di Blackout. In L'incredibile Hulk , il generale Ross si reca con la sua squadra a New York a bordo di un MH-53, che poi si intrometterà nello scontro tra Hulk e Abominio e verrà abbattuto.
- RAH-66 Comanche - 4 Comanche attaccano Hulk nel film del 2003 ; Hulk ne abbatte uno rilanciandogli addosso un missile Hellfire, e salta addosso ad un altro facendolo schiantare per il peso e lo spostamento del baricentro; i due rimasti lo inseguono e tentano di seppellirlo tra le montagne colpendo le rocce con i missili.
- Aérospatiale SA 341 Gazelle - due esemplari di questo modello furono modificati (la cabina era simile a quella di un Apache o un Cobra ) per il film Tuono blu e per la serie tv omonima .
- Nel film di Frank Capra Accadde una notte (1934) il promesso sposo di Claudette Colbert atterra per le nozze nel prato della villa utilizzando un prototipo di elicottero ( autogiro nella versione italiana).
L'elicottero nei videogiochi
A partire dai primi videogiochi di guerra arcade degli anni 80, gli elicotteri sono comparsi spesso nei videogames, raramente come protagonisti; il primo è forse Microsoft Flight Simulator , (1982), che però includerà la possibilità di pilotare elicotteri solo negli anni 90 (con la versione '98). Tra i più famosi c'è la serie Comanche , Extreme Assault , Desert Storm (basata sul controllo in un Apache) e Desert Storm 2 ed infine War Thunder .
Case produttrici
Note
- ^ ( EN ) Robert Lemos, The Helicopter: A Hundred Years of Hovering , su wired.com , Wired, 12 novembre 2007. URL consultato il 5 gennaio 2020 ( archiviato il 2 aprile 2015) .
- ^ ( EN ) Greg Goebel, Helicopter Origins , su vectorsite.net , Vectorsite, 1º giugno 2011. URL consultato il 5 gennaio 2020 (archiviato dall' url originale il 10 novembre 2011) .
- ^ Vite Aerea, 1483-1486, Codice Atlantico , foglio 83 v., Milano, Biblioteca Ambrosiana.
- ^ Catalogo collezioni - Macchina volante vite aerea - museoscienza , su www.museoscienza.org . URL consultato il 13 maggio 2016 ( archiviato il 13 maggio 2016) .
- ^ 1480: Leonardo Da Vinci's Helical Air Screw Archiviato il 14 agosto 2013 in Internet Archive . da Pilotfriend.com .
- ^ Vite aerea Archiviato il 29 marzo 2013 in Internet Archive . dal sito del Museo nazionale della scienza e della tecnologia Leonardo da Vinci.
- ^ a b c d e f g h i j k l m Florian Ion Petrescu, Relly Victoria Petrescu, The Aviation History , BoD – Books on Demand, 2012, pp. 72-74, ISBN 978-3-8482-3077-8 .
- ^ a b Giuseppe Mormino, La storia della prima elica , su Sapere , Ulrico Hoepli Editore, Data pubblicazione 15 novembre 1936, Anno II – Volume IV – n. 45. URL consultato l'8 dicembre 2008 ( archiviato il 7 dicembre 2008) .
- ^ a b c Museo nazionale della scienza e della tecnologia Leonardo da Vinci , Nuova area elicotteri ( PDF ), su museoscienza.org . URL consultato l'8 dicembre 2008 .
- ^ ( EN ) Judy Rumerman, Early Helicopter Technology , su centennialofflight.gov , US Centennial of Flight Commission. URL consultato l'8 dicembre 2008 (archiviato dall' url originale il 21 agosto 2011) .
- ^ AA. VV., Enciclopedia dell'Aviazione, Novara, EDIPEM, 1978, Vol. 3, pp. 62, 63.
- ^ ( EN ) J. Gordon Leishman, Bradley Johnson, Engineering Analysis of the 1907 Cornu Helicopter ( PDF ), su helicopter-history.org , Department of Aerospace Engineering Glenn L. Martin Institute of Technology University of Maryland, Data pubblicazione 17-11-2007. URL consultato l'8 dicembre 2008 ( archiviato il 1º ottobre 2008) . Nel testo citato, il Dott. J. Gordon Leishman, una membro dell'AHS Fellow International, al 64° forum annuale della American Helicopter Society International, esprimeva dubbi sulle possibilità della macchina di Cornu, sostenendo che essa non aveva un motore di sufficiente potenza e un sistema di controllo tali da permetterle di sollevarsi dal terreno in volo libero.
- ^ ( EN ) Paul Cornu , su centennialofflight.gov , US Centennial of Flight Commission. URL consultato l'8 dicembre 2008 (archiviato dall' url originale l'8 aprile 2007) .
- ^ AA. VV., Enciclopedia dell'Aviazione, Novara, EDIPEM, 1978, Vol. 5, p. 222.
- ^ "New Helicopter Rises in Vertical Flight." Archiviato il 2 novembre 2013 in Internet Archive . Popular Science , Novembre 1930, p. 70.
- ^ "Helicopter With Six Blades Succeeds In Tests." Archiviato il 3 novembre 2013 in Internet Archive . Popular Mechanics, March 1931.
- ^ Rumerman, Judy. "Helicopter Development in the Early Twentieth Century" Archiviato il 5 maggio 2012 in Internet Archive .. Centennial of Flight Commission. Retrieved 28 November 2007.
- ^ Munson Kenneth, Helicopters and other Rotorcraft since 1907 , Londra, Blandford Publishing, 1968, ISBN 978-0-7137-0493-8 .
- ^ a b Spenser 1998.
- ^ Umberto Anerdi, L'elicottero, una storia lunga cinque secoli , La Manovella, febbraio 2017
- ^ Watkinson John, Art of the Helicopter , Oxford, Elsevier Butterworth-Heinemann, 2004, p. 358, ISBN 0-7506-5715-4 .
- ^ AA. VV., Enciclopedia dell'Aviazione, Novara, EDIPEM, 1978, Vol. 1, p. 101.
- ^ Virgilio Gavino, Ali ruotanti e ali battenti , su Sapere , Ulrico Hoepli Editore, Data pubblicazione 15 ottobre 1941, Anno VII – Volume XIV – Serie Seconda – n. 43/163. URL consultato l'8 dicembre 2008 ( archiviato il 2 ottobre 2010) .
- ^ a b c AA. VV., Enciclopedia dell'Aviazione, Novara, EDIPEM, 1978, Vol. 3, pp. 296-297.
- ^ AA. VV., Enciclopedia dell'Aviazione, Novara, EDIPEM, 1978, Vol. 5, pp. 218, 219.
- ^ Sikorsky II, The Story of the Winged-S: An Autobiography , New York, Dodd, Mead & Co., 1967.
- ^ ( EN ) A History of Helicopter Flight ( PDF ), su aviatorsdatabase.com .
- ^ Rapporto su incidente dovuto al power settling ( PDF ), su ansv.it , Agenzia Nazionale per la Sicurezza del Volo, 8 aprile 2004. URL consultato il 26 aprile 2014 ( archiviato il 27 settembre 2007) .
- ^ STA - dispense - Autorotazione , su e-ser.eu . URL consultato il 16 aprile 2018 ( archiviato l'11 novembre 2018) .
- ^ Elicotteri duali, quando il mercato civile traina lo sviluppo militare , su helipress.it , 28 ottobre 2014. URL consultato l'11 giugno 2018 ( archiviato il 12 giugno 2018) .
- ^ B. Malovrh and F. Gandhi. Sensitivity of helicopter blade-vortex-interaction noise and vibration to interaction parameters. Journal of Aircraft, 42(3): 685-697, May-June 2005.
- ^ Al riguardo, si può consultare la voce Advance ratio della Wikipedia in inglese .
- ^ Schmitz, Sven, Aerodynamics of wind turbines : a physical basis for analysis and design , Hoboken, Wiley, 2019 n, p. 35, ISBN 9781119405610 , OCLC 1104922440 ( archiviato il 12 febbraio 2020) .
- ^ ( EN ) L. Trainelli, M.Gennaretti, G. Bernardini, A. Rolando, Carlo ED Riboldi, M. Redaelli, L. Riviello e A. Scandroglio, Innovative Helicopter In-Flight Noise Monitoring Systems Enabled by Rotor-State Measurements ( PDF ), in Noise Mapping , vol. 3, n. 1, De Gruyter , 2016, p. 191, DOI : 10.1515/noise-2016-0014 , ISSN 2084-879X , OCLC 6115301292 . URL consultato il 12 febbraio 2020 ( archiviato il 12 febbraio 2020) . Ospitato su archive.is .
- ^ ( EN ) L3 Communications WESCAM , su wescam.com . URL consultato l'8 dicembre 2008 ( archiviato l'11 dicembre 2008) .
- ^ ( EN ) Celebrity Helicopters, Inc. web site , su celebheli.com . URL consultato l'8 dicembre 2008 ( archiviato il 20 dicembre 2008) .
- ^ ( EN ) Movies - our helicopters available for movie Story Ship. , su furyhelicopters.com , Fury Helicopters. URL consultato l'8 dicembre 2008 (archiviato dall' url originale il 24 marzo 2008) .
- ^ ( EN ) AJ Vesak - Aerial Cinematographer , su ajvesak.com . URL consultato l'8 dicembre 2008 (archiviato dall' url originale il 4 dicembre 2008) .
- ^ ( EN ) Rotary Action - guide to helicopters in movies and television at rotaryaction.com , su Rotary Action . URL consultato il 6 dicembre 2008 (archiviato dall' url originale il 2 maggio 2019) .
- ^ ( EN ) index at rotaryaction.com - website of helicopters in movies and tv , su Rotary Action , Pigasus Press. URL consultato l'8 dicembre 2008 (archiviato dall' url originale il 2 maggio 2019) .
Voci correlate
Altri progetti
-
 Wikiquote contiene citazioni di o su elicottero
Wikiquote contiene citazioni di o su elicottero -
 Wikizionario contiene il lemma di dizionario « elicottero »
Wikizionario contiene il lemma di dizionario « elicottero » -
 Wikimedia Commons contiene immagini o altri file su elicottero
Wikimedia Commons contiene immagini o altri file su elicottero
Collegamenti esterni
- Elicottero , su Treccani.it – Enciclopedie on line , Istituto dell'Enciclopedia Italiana .
- ( EN ) Elicottero , su Enciclopedia Britannica , Encyclopædia Britannica, Inc.
- ( EN ) Storia dell'elicottero , su centennialofflight.com .
- ( EN ) Lo sviluppo degli elicotteri all'inizio del Novecento , su centennialofflight.gov . URL consultato il 30 giugno 2005 (archiviato dall' url originale il 10 ottobre 2012) .
- ( EN ) US ARMY HELICOPTER INFO , su tri.army.mil . URL consultato il 6 dicembre 2008 (archiviato dall' url originale il 25 maggio 2007) .
- ( EN ) A GUIDE TO HELICOPTERS IN CINEMA & TELEVISION , su rotaryaction.com . URL consultato il 6 dicembre 2008 (archiviato dall' url originale il 2 maggio 2019) .
- Armamento Aereo - Contemporaneo , su libreriamilitare.com (archiviato dall' url originale il 2 luglio 2007) .
- Registro elicotteri italiani ed altro ancora , su dgualdo.it .
- Gli elicotteri delle Forze Armate italiane , su alfonsomartone.itb.it .
- Elicottero , in Treccani.it – Enciclopedie on line , Istituto dell'Enciclopedia Italiana.
| Controllo di autorità | Thesaurus BNCF 23161 · LCCN ( EN ) sh85060007 · GND ( DE ) 4025993-6 · BNF ( FR ) cb119320092 (data) |
|---|