Integrală multiplă ca volum sub o suprafață. Volumul cuboidului{\ displaystyle P} din laturile 4 × 6 × 5 se poate obține în două moduri: ambele prin intermediul integralei duble {\ displaystyle \ iint _ {D} 5dxdy} a funcției {\ displaystyle f (x, y) = 5} calculat în „intervalul” 2-dimensional ” D (regiune aparținând planului xy ), ambele prin intermediul integralei triple {\ displaystyle \ iiint _ {P} 1dxdydz} a funcției constante 1 calculată în raport cu „intervalul tridimensional” care coincide cu paralelipipedul însuși {\ displaystyle P} . În acest caz, volumul este calculat ca „suma” tuturor elementelor infinitezimale care alcătuiesc domeniul.
Integral multiplu L 'este o formă de integrală definită extinsă la funcții ale mai multor variabile reale (de exemplu, funcții ale formei {\ displaystyle f (x, y)} sau forma {\ displaystyle f (x, y, z)} ).
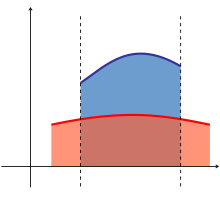
Integralele definite posedă interpretări geometrice și fizice semnificative: doar pentru simplitate funcțiile cu valori pozitive, în timp ce integralul definit pentru o funcție a unei variabile reprezintă zona regiunii numită trapez între graficul său și axa absciselor, integralul definit pentru funcțiile a două variabile (integrală dublă) oferă măsurarea volumului solidului numit cilindroide între suprafața care dă graficul și planul care conține domeniul său.
În general, integralele definite ale funcțiilor 3 sau mai multe variabile sunt interpretate ca măsuri ale hipervolumelor sau ale solidelor de 4 sau mai multe volume ca dimensiune, prin urmare nu sunt reprezentate grafic. O integrală triplă, o integrală definită a unei funcții a trei variabile, poate fi interpretată fizic ca o măsură a masei unui corp care ocupă spațiul corespunzător domeniului și care are densitatea variabilă furnizată de valorile funcției în sine.
Definiția integralei Riemann în cazul funcțiilor mai multor variabile este similară din punct de vedere conceptual cu cea a integralei într-o singură variabilă, dar este în general mai laborioasă din cauza varietății de seturi pe care se realizează integrarea. Funcțiile simple care aproximează funcțiile sunt de fapt definite pe o căsătorie peste dreptunghiuri sub forma: [1]
{\ displaystyle R = [a_ {1}, b_ {1}) \ times [a_ {2}, b_ {2}) \ times \ cdots \ times [a_ {n}, b_ {n}),}
unde este {\ displaystyle R \ subset \ mathbb {R} ^ {n}} . Măsura Peano-Iordan a fiecărui dreptunghi este:
unde coeficienții {\ displaystyle c_ {i}} sunt constante reale, {\ displaystyle R_ {i}} este o succesiune de dreptunghiuri în {\ displaystyle R} Și{\ displaystyle \ chi _ {R_ {i}}} Este funcția caracteristică a {\ displaystyle R_ {i}} . Dacă dreptunghiurile sunt toate disjuncte, acesta dictează {\ displaystyle T} unirea lor, se definește integrala funcției simple {\ displaystyle \ phi} pe {\ displaystyle T} În felul următor:
În acest context, o funcție {\ displaystyle f} se spune că este integrabil dacă poate fi aproximat cu precizie arbitrară prin funcții simple majore și minore. În mod echivalent, dacă pentru fiecare {\ displaystyle \ varepsilon> 0} există două funcții simple {\ displaystyle \ phi} Și {\ displaystyle \ psi} astfel încât {\ displaystyle \ phi \ leq f \ leq \ psi} Și:
De sine {\ displaystyle f} este integrabilă, integrala sa este limita integralelor lui {\ displaystyle \ phi} Și {\ displaystyle \ psi} ca numărul de dreptunghiuri sau să tindă la diametrul lor. În mod echivalent: integralul este „ capătul superior al integralelor limitelor funcțiilor simple, care este egal cu capătul inferior al integralelor limitelor superioare ale funcțiilor simple.
Exemplu de extensie de domeniu la un dreptunghi, în cazul unui domeniu de conținut din R 2.
Nu este necesar ca întregul {\ displaystyle T} unde se operează integralul este o uniune finită de dreptunghiuri: deoarece unirea este mărginită, este întotdeauna posibil să se extindă funcția integrand pe un dreptunghi de „mediu” {\ displaystyle \ Omega} care conține domeniul funcției de pornire, având în vedere funcția
{\ displaystyle g ({\ vec {x}}) = {\ begin {cases} f ({\ vec {x}}) \ quad & {\ vec {x}} \ în T, \\ 0 & {\ vec {x}} \ in \ Omega \ setminus T. \ end {cases}}}
Definim integralul {\ displaystyle f} pe {\ displaystyle T} ca integral al {\ displaystyle g} pe {\ displaystyle \ Omega} . Această definiție este bine pusă, deoarece este ușor de verificat dacă integrabilitatea și valoarea integralei nu depind de alegerea {\ displaystyle \ Omega} , atâta timp cât conține {\ displaystyle T} .
Cu toate acestea, în cazul integralei Lebesgue , definiția nu variază în niciun fel cu o dimensiune multiplă, deoarece se bazează doar pe măsurarea seturilor. Din nou, pentru a defini o potrivire pe {\ displaystyle \ mathbb {R} ^ {n}} , O parte prin dreptunghiuri și uniunile lor finite: acestea formează o algebră , pe care măsurarea este definită anterior σ-aditiv . Apoi, prin teorema lui Carathéodory , aceasta poate fi extinsă la o măsură (numită măsură Lebesgue ) pe σ-algebra lui Lebesgue.
Proprietate
Multiplicul integral împarte proprietățile care caracterizează integralul pentru o funcție variabilă: este liniar , aditiv (adică este posibil să se rupă domeniul de integrare), monoton ; valoarea absolută a integralei verifică
{\ displaystyle \ left | \ int _ {E} f (\ mathbf {x}) \ mathrm {d} \ mathbf {x} \ right | \ leq \ int _ {E} | f (\ mathbf {x}) | \ mathrm {d} \ mathbf {x}.}
Din definiția generală, pentru orice eventualitate {\ displaystyle T} este un subset al planului, uneori apare
{\ displaystyle \ int _ {T} f (x, y) \ mathrm {d} x \ mathrm {d} y = \ iint _ {T} f (x, y) \ mathrm {d} x \ mathrm {d } y}
și vorbim de dublare integrală {\ displaystyle T} ; la fel, dacă {\ displaystyle S} este un subset de {\ displaystyle \ mathbb {R} ^ {3}} , integrala sa triplă este
{\ displaystyle \ int _ {S} f (x, y, z) \ mathrm {d} x \ mathrm {d} y \ mathrm {d} z = \ iiint _ {S} f (x, y, z) \ mathrm {d} x \ mathrm {d} y \ mathrm {d} z.}
În majoritatea aplicațiilor tehnice, cum ar fi cele din domeniul ingineriei , tipul problemelor analizate implică aproape exclusiv integrale duble și triple.
Integrală necorespunzătoare
Exemplu de domeniu incorect
Ca și în cazul unei singure variabile, definiția unei integrale Riemann necesită integrarea funcțiilor mărginite pe seturi mărginite. Pentru a extinde definiția la alte cazuri, primul pas este să ia în considerare aspectele pozitive și să ia în considerare o secvență crescândă de compact (adică închisă limitată acolo unde {\ displaystyle E_ {k} \ subset E_ {k + 1}} ) unde funcția este mărginită, a cărei limită (care coincide cu unirea lor) este setul de integrare {\ displaystyle E} . În acest caz, secvența integralelor de pe {\ displaystyle E_ {k}} este o succesiune în creștere și, prin urmare, are o limită; datează, de asemenea, o altă succesiune de seturi cu aceleași caracteristici, fiecare element al acestuia din urmă este între două elemente (nu neapărat consecutive) ale primului, iar apoi pentru teorema poliției , limita este aceeași.
În cazul funcțiilor în orice semn, este suficient să o împărțiți în partea sa pozitivă și în partea sa negativă; integralul va fi deci definit dacă poate fi definit separat pentru ambele. Acest lucru este echivalent cu a cere ca integrala (necorespunzătoare) a valorii sale absolute să fie finită. [2]
Integrala Lebesgue, pe de altă parte, nu are nevoie de această construcție, deoarece definiția sa include deja cazuri în care funcția sau domeniul integrării nu sunt delimitate.
Soluția problemelor cu multiple integrale constă în majoritatea cazurilor în posibilitatea de a reduce calculele la o serie de integrale la o singură variabilă, singurele care pot fi rezolvate direct.
Examinare directă
În câteva cazuri speciale este posibil să se evite calculele directe și să se obțină imediat rezultatul integrării. Unul dintre acestea este cazul funcțiilor constante de integrare ale dreptunghiurilor: în acest caz, cunoscând întinderea domeniului, trebuie doar să se înmulțească cu valoarea constantei {\ displaystyle n} . De sine {\ displaystyle n = 1} , în {\ displaystyle \ mathbb {R} ^ {2}} veți avea volumul unui paralelipiped, în timp ce vă aflați în {\ displaystyle \ mathbb {R} ^ {3}} hipervolumul său.
În alte cazuri puteți profita de disparitatea funcției în raport cu o variabilă coroborată cu simetria domeniului corespunzător în raport cu axa, obținând un zero integral: de exemplu, funcția {\ displaystyle y ^ {2} \ sin x} este ciudat în {\ displaystyle x} , și, prin urmare, integrala sa în semicercul superior {\ displaystyle \ {x ^ {2} + y ^ {2} \ leq 1, y \ geq 0 \}} Este egal cu.
Un element esențial în calculul multiplelor integrale este dat de posibilitatea de a „rupe” integralul în mai multe dimensiuni în integrale diferite pe {\ displaystyle \ mathbb {R}} , Unde poate fi aplicat, de exemplu, teorema fundamentală a calculului . Adică, am dori să avem o formulă de acest tip
unde, pentru simplitatea notării, sunt luate în considerare integralele pe întreg spațiul (care pot fi întotdeauna urmărite înmulțind cu funcția caracteristică): în acest caz, integrala din dreapta poate fi rezolvată mai întâi (tratând prima {\ displaystyle n-1} variabile ca constante) și apoi restul, posibil scoaterea unei alte variabile (și așa mai departe). Cu toate acestea, această formulă nu este întotdeauna valabilă. În cel mai general caz, cele două teoreme fundamentale în acest caz sunt teorema lui Tonelli și cea a lui Fubini: prima asigură validitatea formulei în cazul funcțiilor pozitive, în timp ce a doua în cazul funcțiilor a căror integrală a valoarea absolută converge. Într-un sens, sunt analogi, respectiv, teoremelor convergenței monotone și convergenței dominate pentru schimbul de operații limită și integrale. Un alt caz în care reducerea, mai particulară dar cu un interes practic considerabil, poate fi realizată este în cazul în care {\ displaystyle f} este continuu, iar setul de integrare este un dreptunghi limitat.
Ambele se referă la expresii mai generale decât precedenta: integralul poate fi de fapt împărțit în două părți ale oricărei dimensiuni (cu condiția ca, evident, suma lor să fie egală cu dimensiunea inițială). Deși majoritatea integralelor nu au nevoie de această generalizare, este utilă, de exemplu, pentru calcularea volumului hipersferelor , adică a sferelor {\ displaystyle n} -dimensional. [3]
Integrală a unei funcții a două variabile pe domeniul normal {\ displaystyle a \ leq x \ leq b, \ alpha (x) \ leq y \ leq \ beta (x)} .
Extinderea integralului la tot {\ displaystyle \ mathbb {R} ^ {n}} Deși este util pentru a demonstra teoremele lui Tonelli și Fubini, nu este totuși ușor pentru calculul eficient al integralelor. În acest caz, se exploatează noțiunea de domeniu simplu (numit și normal): acesta este un set în care o coordonată este constant între valorile a două funcții (măsurabile) ale celorlalte variabile. De exemplu, în cazul a două variabile, integrala lui {\ displaystyle f} pe un domeniu normal în raport cu axa {\ displaystyle x} , definit de funcții {\ displaystyle \ alpha (x)} Și {\ displaystyle \ beta (x)} , cu {\ displaystyle x} între {\ displaystyle a} Și {\ displaystyle b} , Și
{\ displaystyle \ int _ {T} f (x, y) \ mathrm {d} x \ mathrm {d} y = \ int _ {a} ^ {b} \ mathrm {d} x \ int _ {\ alpha (x)} ^ {\ beta (x)} f (x, y) \ mathrm {d} y,}
în timp ce, dacă domeniul ar fi normal în raport cu axa {\ displaystyle y} , ai face
{\ displaystyle \ int _ {T} f (x, y) \ mathrm {d} x \ mathrm {d} y = \ int _ {a} ^ {b} \ mathrm {d} y \ int _ {\ alpha (y)} ^ {\ beta (y)} f (x, y) \ mathrm {d} x.}
Schimbarea variabilelor
Uneori domeniul pe care este necesar să se integreze nu este ușor de reprezentat în formă normală (de exemplu, deoarece este dat sub formă implicită). În acest caz, este posibil să se recurgă la o schimbare de variabile pentru a ocoli problema și a integra funcții cunoscute pe regiuni "confortabile", adică domenii simple sau, în orice caz, care pot fi descrise într-un mod mai simplu. În mod formal, au fost date două seturi {\ displaystyle A} Și {\ displaystyle B} , o functie {\ displaystyle f \ colon A \ to \ mathbb {R}} și un difeomorfism (adică aplicație -la-una , diferențiat și invers diferențiat) {\ displaystyle \ Phi} din {\ displaystyle B} la {\ displaystyle A} Apoi: [4]
{\ displaystyle \ int _ {A} f (\ mathbf {x}) \ mathrm {d} \ mathbf {x} = \ int _ {B} f (\ Phi (\ mathbf {y})) | \ det ( J _ {\ Phi} (\ mathbf {y})) | \ mathrm {d} \ mathbf {y}}
unde este {\ displaystyle J _ {\ Phi}} indică matricea iacobiană a {\ displaystyle \ Phi} . În practică, variabilele sunt transformate în funcție de schimbarea variabilei, dar apare un „element de volum” corespunzător determinantului Jacobianului.
De exemplu, dorind să integreze funcția{\ displaystyle f (x, y) = {\ frac {1} {2x + y}}} în ansamblu {\ displaystyle E = \ {x <y <2x, 1 <x + y <3 \} = \ left \ {1 <{\ frac {y} {x}} <2,1 <x + y <3 \ dreapta \}} , o posibilă transformare este
{\ displaystyle {\ begin {pmatrix} - {\ frac {v} {(u + 1) ^ {2}}} și {\ frac {1} {u + 1}} \\ {\ frac {v} { (u + 1) ^ {2}}} și {\ frac {u} {u + 1}} \ end {pmatrix}}}
și al cărei determinant este{\ displaystyle - {\ frac {v} {(u + 1) ^ {2}}},} asa de
{\ displaystyle \ int _ {E} f (x, y) \ mathrm {d} x \ mathrm {d} y = \ int _ {F} f \ left ({\ frac {v} {u + 1}} , {\ frac {uv} {u + 1}} \ right) | \ det (J _ {\ Phi} (u, v)) | \ mathrm {d} u \ mathrm {d} v =}
{\ displaystyle = \ int _ {F} {\ frac {u + 1} {2v + uv}} {\ frac {v} {(u + 1) ^ {2}}} \ mathrm {d} u \ mathrm {d} v = \ int _ {F} {\ frac {1} {(u + 1) (u + 2)}} \ mathrm {d} u \ mathrm {d} v,}
care poate fi rezolvată folosind teorema lui Tonelli (sau a lui Fubini).
Unele modificări variabile sunt foarte frecvente: prima, în două dimensiuni, este trecerea la coordonatele polare, în timp ce celelalte două, în {\ displaystyle \ mathbb {R} ^ {3}} , sunt trecerea la coordonatele sferice și cilindrice.
Trecerea de la coordonatele carteziene la cele polare
În {\ displaystyle \ mathbb {R} ^ {2}} , dacă domeniul pe care urmează să fie integrat prezintă o simetrie radială sau caracteristici circulare, o schimbare de variabilă utilizată pe scară largă este trecerea în coordonate polare. Relația fundamentală pentru a efectua transformarea funcției este
{\ displaystyle {\ frac {\ partial (x, y)} {\ partial (\ rho, \ phi)}} = {\ begin {vmatrix} \ cos \ phi & - \ rho \ sin \ phi \\\ sin \ phi & \ rho \ cos \ phi \ end {vmatrix}} = \ rho.}
Prin urmare, formula totală a pasajului în coordonate polare este
{\ displaystyle \ int _ {D} f (x, y) \ dxdy = \ int _ {T} f (\ rho \ cos \ phi, \ rho \ sin \ phi) \ \ rho \ \ mathrm {d} \ rho \ \ mathrm {d} \ phi.}
Gama maximă în care poate varia {\ displaystyle \ phi} Și {\ displaystyle [0,2 \ pi)} , in timp ce {\ displaystyle \ rho} , fiind măsura unei lungimi, nu poate avea decât valori pozitive.
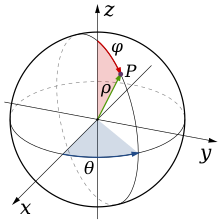
Coordonate sferice
În mai mult de două dimensiuni, coordonatele polare sunt generalizate din coordonatele sferice și hipersferice (pentru patru sau mai multe dimensiuni; sunt numite și „sferice generalizate” sau pur și simplu „sferice”). În trei dimensiuni o posibilă transformare este
{\ displaystyle x = \ rho \ sin \ phi \ cos \ theta}
{\ displaystyle y = \ rho \ sin \ phi \ sin \ theta}
{\ displaystyle z = \ rho \ cos \ phi,}
unde este {\ displaystyle \ theta} variază între și {\ displaystyle 2 \ pi} , in timp ce {\ displaystyle \ phi} intre si {\ displaystyle \ pi} ; {\ displaystyle \ rho} , ca și în cazul anterior, poate merge de la infinit. Jacobianul transformării este:
{\ displaystyle {\ frac {\ partial (x, y, z)} {\ partial (\ rho, \ theta, \ phi)}} = {\ begin {vmatrix} \ sin \ phi \ cos \ theta & - \ rho \ sin \ phi \ sin \ theta & \ rho \ cos \ phi \ cos \ theta \\\ sin \ phi \ sin \ theta & \ rho \ sin \ phi \ cos \ theta & \ rho \ cos \ phi \ sin \ theta \\\ cos \ phi & 0 & - \ rho \ sin \ phi \ end {vmatrix}} = - \ rho ^ {2} \ sin \ phi.}
Domeniul integrării care se potrivește cel mai bine acestui pasaj este, evident, sfera.
În {\ displaystyle n} dimensiunile, trecerea coordonatelor ia, pe lângă distanță {\ displaystyle \ rho} , de asemenea {\ displaystyle n-1} colțuri {\ displaystyle \ phi _ {1}, \ phi _ {2}, \ ldots, \ phi _ {n-1}} , ultima dintre acestea ia valori care variază între și {\ displaystyle 2 \ pi} , în timp ce celelalte între și {\ displaystyle \ pi} :
{\ displaystyle x_ {1} = \ rho \ sin \ phi _ {1} \ cdots \ sin \ phi _ {n-3} \ sin \ phi _ {n-2} \ sin \ phi _ {n-1} }
{\ displaystyle x_ {2} = \ rho \ sin \ phi _ {1} \ cdots \ sin \ phi _ {n-3} \ sin \ phi _ {n-2} \ cos \ phi _ {n-1} }
{\ displaystyle x_ {3} = \ rho \ sin \ phi _ {1} \ cdots \ sin \ phi _ {n-3} \ cos \ phi _ {n-2}}
{\ displaystyle \ vdots}
{\ displaystyle x_ {n-1} = \ rho \ sin \ phi _ {1} \ cos \ phi _ {2}}
{\ displaystyle \ left | \ det {\ frac {\ partial (x_ {i})} {\ partial (r, \ phi _ {j})}} \ right | = \ rho ^ {n-1} \ sin ^ {n-2} (\ phi _ {1}) \ sin ^ {n-3} (\ phi _ {2}) \ cdots \ sin (\ phi _ {n-2}).}
Coordonate cilindrice
Coordonate cilindrice
O altă posibilă generalizare a coordonatelor polare ad {\ displaystyle \ mathbb {R} ^ {3}} sunt coordonatele cilindrice. În ele, un avion (de obicei acela {\ displaystyle xy} ) este parametrizat prin coordonatele polare, în timp ce înălțimea rămâne neschimbată: această modificare a variabilelor este, prin urmare, potrivită pentru domeniile cu o bază circulară sau, în orice caz, în care dificultatea de integrare nu are legătură cu una dintre variabile (de exemplu, dacă „setul de integrare este un cilindru sau un con ).
Relația este
{\ displaystyle x = \ rho \ cos \ theta}
{\ displaystyle y = \ rho \ sin \ theta}
{\ displaystyle z = z}
și, din moment ce ultima variabilă rămâne fixă și este total independentă de variația celorlalte, elementul de zonă coincide cu cel al trecerii în coordonate polare, adică este exact {\ displaystyle \ rho} .
Din motive de completitudine, se arată:
{\ displaystyle {\ frac {\ partial (x, y, z)} {\ partial (\ rho, \ theta, z)}} = {\ begin {vmatrix} \ cos \ theta & - \ rho \ sin \ theta & 0 \\\ sin \ theta & \ rho \ cos \ theta & 0 \\ 0 & 0 & 1 \ end {vmatrix}} = \ rho (\ cos \ theta) ^ {2} + \ rho (\ sin \ theta) ^ {2} = \ rho.}
Exemplu de aplicații matematice
Calcule de volum
Datorită metodelor descrise mai sus, este posibil să se demonstreze valoarea volumului unor solide.
Cilindru
Considerând baza circulară a razei ca domeniu {\ displaystyle R} iar înălțimea constantă ca funcție {\ displaystyle h} , trecerea în coordonate polare se aplică direct.
{\ displaystyle {\ begin {align} {\ text {Volume}} & = \ int _ {0} ^ {2 \ pi} \ mathrm {d} \ phi \ int _ {0} ^ {R} h \ rho \; \ mathrm {d} \ rho \\ & = h2 \ pi \ left [{\ frac {\ rho ^ {2}} {2}} \ right] _ {0} ^ {R} \\ & = \ pi R ^ {2} h \ end {align}}}
Verificați: Volumul = zona de bază * înălțimea = {\ displaystyle \ pi R ^ {2} \ cdot h}
Minge
Formula poate fi demonstrată rapid prin aplicarea pasajului în coordonate sferice a funcției constante {\ displaystyle 1} integrat pe sfera razei {\ displaystyle R} în sine.
{\ displaystyle {\ begin {align} {\ text {Volume}} & = \ int _ {0} ^ {2 \ pi} \ mathrm {d} \ phi \ int _ {0} ^ {\ pi} \ sin \ theta \; \ mathrm {d} \ theta \ int _ {0} ^ {R} \ rho ^ {2} \; \ mathrm {d} \ rho \\ & = 2 \ pi \ int _ {0} ^ {\ pi} \ sin \ theta {\ frac {R ^ {3}} {3}} \; \ mathrm {d} \ theta \\ & = {\ frac {2} {3}} \ pi R ^ { 3} {\ Big [} - \ cos \ theta {\ Big]} _ {0} ^ {\ pi} \\ & = {\ frac {4} {3}} \ pi R ^ {3} \ end { aliniat}}}
Volumul tetraedrului cu vârf la origine și margini în lungime {\ displaystyle l} culcat pe cele trei axe cartesiene poate fi calculat folosind formulele de reducere luând în considerare, de exemplu, normalitatea față de plan {\ displaystyle xy} și spre axă {\ displaystyle x} și cum funcționează constanta {\ displaystyle 1} .
{\ displaystyle {\ begin {align} {\ text {Volume}} & = \ int _ {0} ^ {l} \; \ mathrm {d} x \ int _ {0} ^ {lx} \; \ mathrm {d} y \ int _ {0} ^ {lxy} \; \ mathrm {d} z \\ & = \ int _ {0} ^ {l} \; \ mathrm {d} x \ int _ {0} ^ {lx} (lxy) \; \ mathrm {d} y \\ & = \ int _ {0} ^ {l} \ left (l ^ {2} -2lx + x ^ {2} - {\ frac { (lx) ^ {2}} {2}} \ right) \; \ mathrm {d} x \\ & = l ^ {3} -ll ^ {2} + {\ frac {l ^ {3}} { 3}} - \ left [{\ frac {l ^ {2}} {2}} - lx + {\ frac {x ^ {2}} {2}} \ right] _ {0} ^ {l} \ \ & = {\ frac {l ^ {3}} {3}} - {\ frac {l ^ {3}} {6}} \\ & = {\ frac {l ^ {3}} {6}} \ end {align}}}
Verificați: Volumul = zona de bază * Înălțimea / 3 = {\ displaystyle {\ frac {l ^ {2}} {2}} \ cdot {\ frac {l} {3}} = {\ frac {l ^ {3}} {6}}}
Integrează-le într-o singură dimensiune
A volte un integrale multiplo può semplificare il calcolo di un integrale in una sola variabile. Un esempio classico è il calcolo della funzione gaussiana , fondamentale nella teoria della probabilità , esteso a tutto l'intervallo reale. L'integrale da calcolare è
Attraverso questa tecnica è possibile calcolare (riconducendo l'integrale a quello appena calcolato) il valore della funzione gamma in {\displaystyle 1/2} : esso è
Un interessante esempio di utilizzo dell'integrale multiplo è nel calcolo dei valori della funzione zeta di Riemann . Infatti {\displaystyle \zeta (2)} può essere riscritto come
dove {\displaystyle 2} è il determinante jacobiano e il dominio {\displaystyle A} è il quadrato che ha per diagonale il segmento di estremi {\displaystyle (0,0)} e {\displaystyle (1,0)} ; questo è simmetrico rispetto all'asse {\displaystyle u} , così come la funzione e quindi l'integrale può essere calcolato solo su metà del dominio, e poi spezzato come
e notando che in entrambi i casi la derivata dell' arcotangente è l'altro fattore (a parte per una costante {\displaystyle -1/2} nel secondo caso), si ottiene
In maniera simile, usando un integrale {\displaystyle 2k} -dimensionale, si possono calcolare i valori di {\displaystyle \zeta (2k)} . [5]
Alcune applicazioni pratiche
Calcolo diretto di E -grafico
Questi integrali sono utilizzati in numerosi ambiti della fisica .
In meccanica il momento d'inerzia viene calcolato come un integrale di volume (ovvero un integrale triplo) della densità pesata col quadrato della distanza dall'asse:
^Per evitare sovrapposizioni tra due rettangoli, gli intervalli sono considerati chiusi a sinistra e aperti a destra. Si potrebbe procedere allo stesso modo con intervalli aperti a sinistra e chiusi a destra.
Portale Matematica : accedi alle voci di Wikipedia che trattano di matematica
Questa è una voce in vetrina , identificata come una delle migliori voci prodotte dalla comunità . È stata riconosciuta come tale il giorno 11 ottobre 2005 — vai alla segnalazione . Naturalmente sono ben accetti suggerimenti e modifiche che migliorino ulteriormente il lavoro svolto.



































































































![{\ displaystyle {\ begin {align} {\ text {Volume}} & = \ int _ {0} ^ {2 \ pi} \ mathrm {d} \ phi \ int _ {0} ^ {R} h \ rho \; \ mathrm {d} \ rho \\ & = h2 \ pi \ left [{\ frac {\ rho ^ {2}} {2}} \ right] _ {0} ^ {R} \\ & = \ pi R ^ {2} h \ end {align}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ea6205ce745ca5d18bf155ae9c4ac7d8f70b8a41)


![{\ displaystyle {\ begin {align} {\ text {Volume}} & = \ int _ {0} ^ {2 \ pi} \ mathrm {d} \ phi \ int _ {0} ^ {\ pi} \ sin \ theta \; \ mathrm {d} \ theta \ int _ {0} ^ {R} \ rho ^ {2} \; \ mathrm {d} \ rho \\ & = 2 \ pi \ int _ {0} ^ {\ pi} \ sin \ theta {\ frac {R ^ {3}} {3}} \; \ mathrm {d} \ theta \\ & = {\ frac {2} {3}} \ pi R ^ { 3} {\ Big [} - \ cos \ theta {\ Big]} _ {0} ^ {\ pi} \\ & = {\ frac {4} {3}} \ pi R ^ {3} \ end { aliniat}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/440ca3d00df781982b71b3bdb3d35597de26ee48)


![{\ displaystyle {\ begin {align} {\ text {Volume}} & = \ int _ {0} ^ {l} \; \ mathrm {d} x \ int _ {0} ^ {lx} \; \ mathrm {d} y \ int _ {0} ^ {lxy} \; \ mathrm {d} z \\ & = \ int _ {0} ^ {l} \; \ mathrm {d} x \ int _ {0} ^ {lx} (lxy) \; \ mathrm {d} y \\ & = \ int _ {0} ^ {l} \ left (l ^ {2} -2lx + x ^ {2} - {\ frac { (lx) ^ {2}} {2}} \ right) \; \ mathrm {d} x \\ & = l ^ {3} -ll ^ {2} + {\ frac {l ^ {3}} { 3}} - \ left [{\ frac {l ^ {2}} {2}} - lx + {\ frac {x ^ {2}} {2}} \ right] _ {0} ^ {l} \ \ & = {\ frac {l ^ {3}} {3}} - {\ frac {l ^ {3}} {6}} \\ & = {\ frac {l ^ {3}} {6}} \ end {align}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f743d7f0817591c65c55f1db009f965813489ea8)




![{\displaystyle I^{2}=-\int _{0}^{2\pi }\mathrm {d} \theta \left[e^{-{\frac {\rho ^{2}}{2}}}\right]_{\rho =0}^{\rho =+\infty }=\int _{0}^{2\pi }\mathrm {d} \theta =2\pi }](https://wikimedia.org/api/rest_v1/media/math/render/svg/35a5c3d97d33b3dedace9919a229a331e9152fc7)







![{\displaystyle =\sum _{n=0}^{+\infty }\left(\int _{[0,1]^{2}}x^{n}y^{n}\mathrm {d} x\mathrm {d} y\right)=\int _{[0,1]^{2}}\sum _{n=0}^{+\infty }x^{n}y^{n}\mathrm {d} x\mathrm {d} y=\int _{[0,1]^{2}}{\frac {1}{1-xy}}\mathrm {d} x\mathrm {d} y,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/25d0de18906368db7e5bfd204d17664dc07cdb8c)


![{\displaystyle \int _{[0,1]^{2}}{\frac {1}{1-xy}}\mathrm {d} x\mathrm {d} y=\int _{A}{\frac {2}{1-u^{2}+v^{2}}}\mathrm {d} u\mathrm {d} v,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4e7d59d24d16d92c766857d7a5c873b6dff17c80)














